· Press Release
Launch of the competence center »ROBDEKON«
If chemically contaminated sites have to be remediated or nuclear facilities have to be dismantled, workers are exposed to considerable health risks despite all precautions and protective equipment. In the future, robotic systems are to carry out such decontamination work so that people can stay away from the danger zone. The new »ROBDEKON Competence Center«, which is being funded by the German Federal Ministry of Education and Research with twelve million euros, is working to make this vision a reality.
ROBDEKON stands for »robotic systems for decontamination in hazardous environments« and is dedicated to research into autonomous or semi-autonomous robotic systems. It is coordinated by the Fraunhofer Institute of Optronics, System Technologies and Image Exploitation IOSB. In addition to the Karlsruhe and Ilmenau sites of the Fraunhofer IOSB, the Karlsruhe Institute of Technology (KIT), the German Research Center for Artificial Intelligence (DFKI) and the FZI Research Center for Information Technology are involved as research institutes. Industrial partners in the consortium are Götting KG, Kraftanlagen Heidelberg GmbH, ICP Ingenieurgesellschaft Prof. Czurda und Partner mbH and KHG Kerntechnische Hilfsdienst GmbH.
ROBDEKON is the first competence center for robotic systems in hazardous environments and has been funded by the German Federal Ministry of Education and Research under the »Research for Civil Security« program since mid-June 2018. Initially, the project will run for four years, but the aim is to ensure the long-term continued existence of the competence center.
Multisensory perception of the environment and motion planning
»Our consortium combines outstanding expertise in the fields of robotics, remediation of contaminated sites and dismantling of nuclear facilities,« says the spokesperson of the ROBDEKON Competence Center, Prof. Dr.-Ing. habil. Jürgen Beyerer. He is professor of computer science at KIT and at the same time head of the Fraunhofer IOSB. »We will now systematically advance the research on multisensorial perception of the environment, algorithms for motion planning, and telepresence technologies. This will enable robots to carry out decontamination activities independently, while humans coordinate and monitor the work safely from a control station and intervene remotely in difficult tasks«.
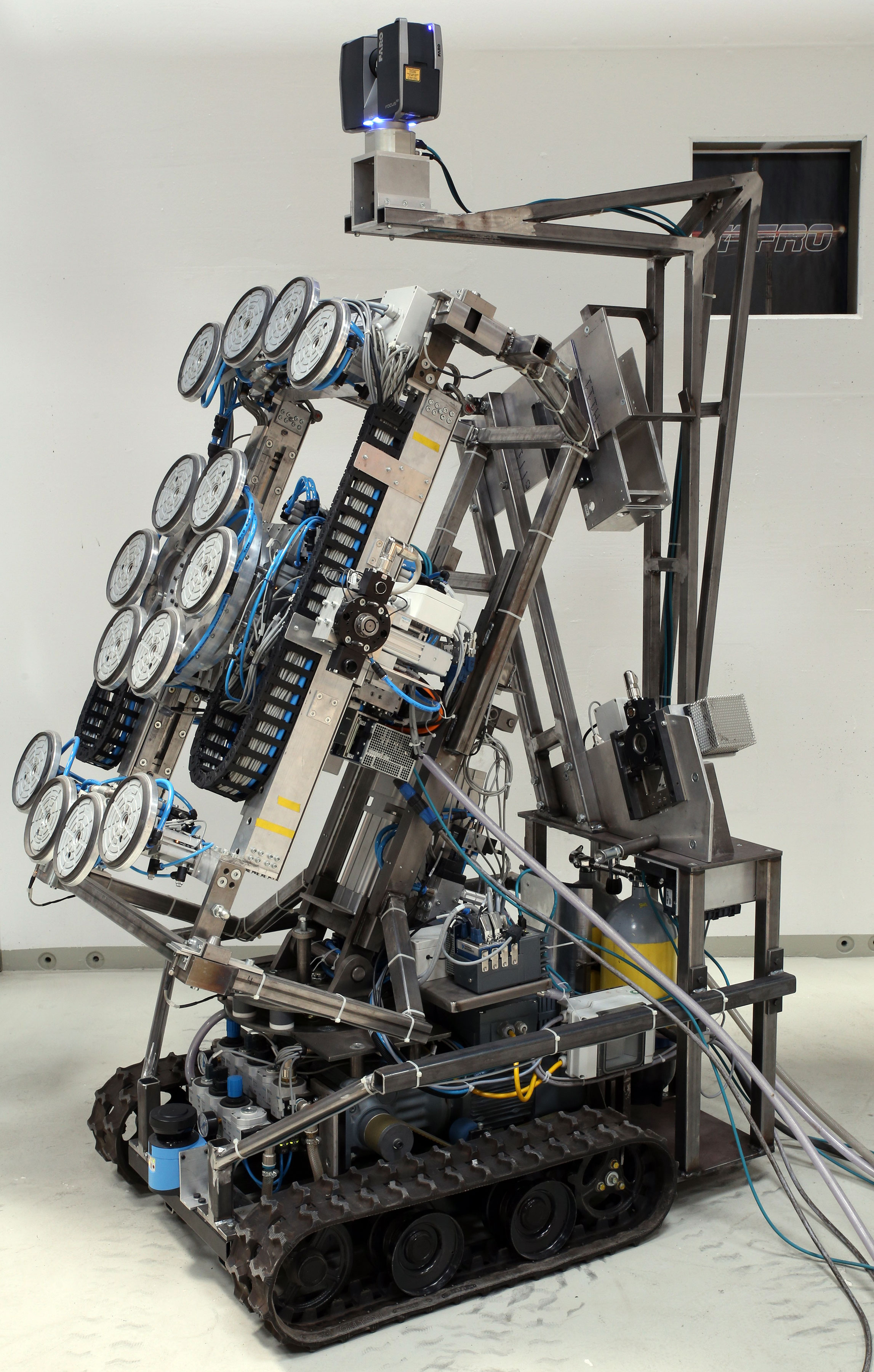
When talking about robots, however, one should not think of classic industrial robots or humanoid robots, explains Beyerer: »We are focusing on innovative concepts such as climbing robots or automated construction machines.

The project partners have different, complementary laboratories, which will be expanded, networked and made accessible to external interested parties in the coming years. With the help of users and industrial partners, promising approaches from research within the framework of ROBDEKON are to be converted into systems suitable for practical application. A coordination office of the competence center will be set up at Fraunhofer IOSB as a central contact point for all inquiries on the topic of robot-based decontamination.
Fraunhofer IOSB: Algorithm Toolbox and autonomous excavator
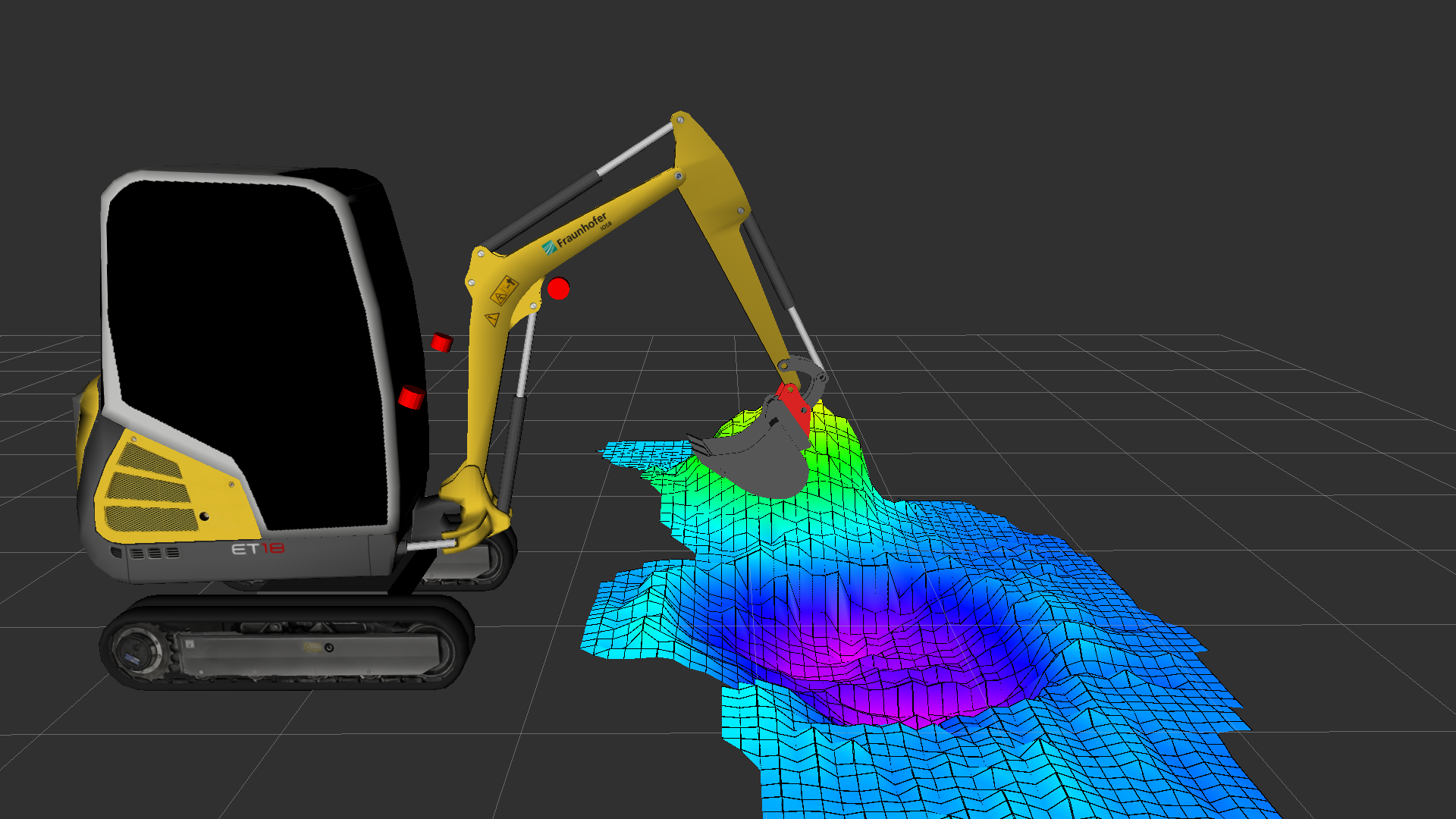
Scientifically, the Fraunhofer IOSB will concentrate on further developing autonomy capabilities for construction machinery - an area in which the institute has many years of experience: »In particular, we are contributing our algorithm toolbox for autonomous mobile robotic systems to ROBDEKON,« explains Christian Frey, the department head responsible. »It makes it possible to navigate in unstructured terrain, avoid obstacles and control manipulators - so that, for example, an excavator can actually pick up contaminated material and unload it at the desired location«.
The institute already has several all-terrain robotic vehicles and a first automated excavator (see above). Christian Frey: »Now it is a matter of transferring these autonomous capabilities to other machines and making them even more flexible, more powerful and easier to handle.
KIT: Decontamination, Telepresence and Living-Lab
One focus of the work at KIT is on robotic systems that can perform decontamination work autonomously or semi-automatically, for example, in nuclear power plants. Researchers at the Chair of High Performance Humanoid Technologies (H²T) and the Research Laboratory for Intelligent Process Automation and Robotics (IPR) design and build robotic systems that can clean or decompose contaminated as well as biologically or chemically contaminated surfaces or plant components. This includes the development of methods for the three-dimensional perception of the surroundings, the inspection of the working environment as well as the planning and execution of decontamination tasks such as the removal of hazardous contamination from objects or surfaces and last but not least the programming of the corresponding control software.
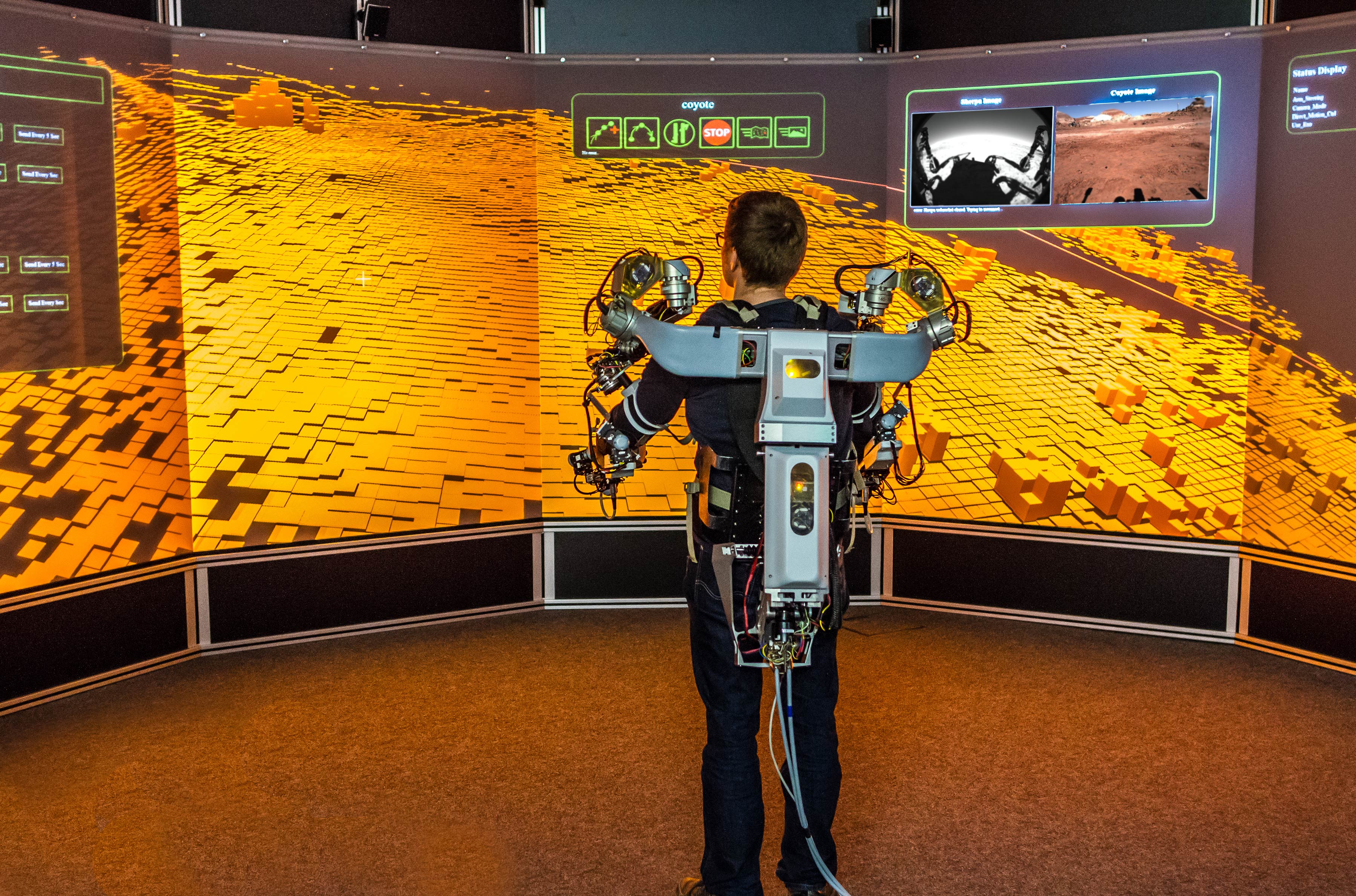
These devices are monitored and controlled using telepresence techniques, which are developed at the Chair of Intelligent Sensor-Actuator-Systems (ISAS). A so-called teleoperator, e.g., a robot, represents the user on site in hazardous environments that may be far away. The teleoperator can, for example, track the user’s head movements and then transmit corresponding camera images. In addition, ISAS is investigating methods to measure and visualize the distribution and intensity of pollution, so that operations can be carried out as efficiently as possible.
Finally, at the Institute for Technology and Management in Construction Operations (TMB), a living lab is being built, in which the robots are tested in various realistic environments and trained for work in nuclear power plants. In addition, the TMB is working on a special robot that can examine concrete surfaces in particular for hazardous contamination, detect it and finally remove it. In the final step, the scientists are investigating how the new methods and equipment can be used in a very practical way on landfills or polluted areas.
FZI: Force-based handling of hazardous substances and Augmented Reality
The FZI Research Center for Information Technology will develop force-based manipulation strategies for mobile robots in the ROBDEKON Competence Center. These will be able to support humans in dismantling, performing release measurements or recovering contaminated objects partially or fully autonomously, even in difficult terrain and when handling unknown objects. FZI scientist Arne Rönnau explains: »The FZI already has great expertise in the development of force-based robotic solutions. We are pleased that we can now bring this knowledge to the ROBDEKON Competence Center and thus make health-critical work safer for humans«.
The project work also includes detailed three-dimensional mapping of the environment and the integration of efficient navigation algorithms. This task, as well as the development of intuitive, well-defined operating concepts for human-robot interaction, will be performed by the FZI. The Karlsruhe scientists also rely on the use of new augmented reality and virtual reality systems for the direct integration of important environmental information into the three-dimensional representations.

DFKI: Robots for extreme environments and hybrid teams
The Robotics Innovation Center of the German Research Center for Artificial Intelligence (DFKI) under the direction of Prof. Dr. Dr. h.c. Frank Kirchner brings to the ROBDEKON Competence Center its many years of expertise in the development of mobile autonomous robots specifically for use in hazardous and extreme environments such as space or deep sea. In order to achieve the necessary autonomy and thus the systems’ ability to act, robots deployed in decontaminated areas have to meet very similar requirements, especially with regard to their mobility, robustness and learning ability (artificial intelligence).
The DFKI research unit has extensive expertise in the areas of machine learning, tele-operation and human-robot collaboration in order to ensure safe cooperation between humans and robots in hybrid teams during deconstruction and decontamination processes. The Robotics Innovation Center will continue to develop novel robotic systems in ROBDEKON that possess the capabilities required for this demanding field of application.