Karlsruhe Institute of Technology (KIT)
As "The Research University in the Helmholtz Association", KIT creates and imparts knowledge for society and environment. Its goal is to make significant contributions to global challenges in the fields of energy, mobility, and information. To this end, about 9300 employees work together on a broad disciplinary basis in the natural sciences, engineering, economics, and humanities and social sciences. KIT prepares its 25100 students for responsible tasks in society, economy, and science by means of research-oriented university studies. KIT’s innovation activities bridge the gap between knowledge and application for the benefit of society, economic prosperity, and preservation of our natural resources.
Chair of High Performance Humanoid Technologies (H2T)
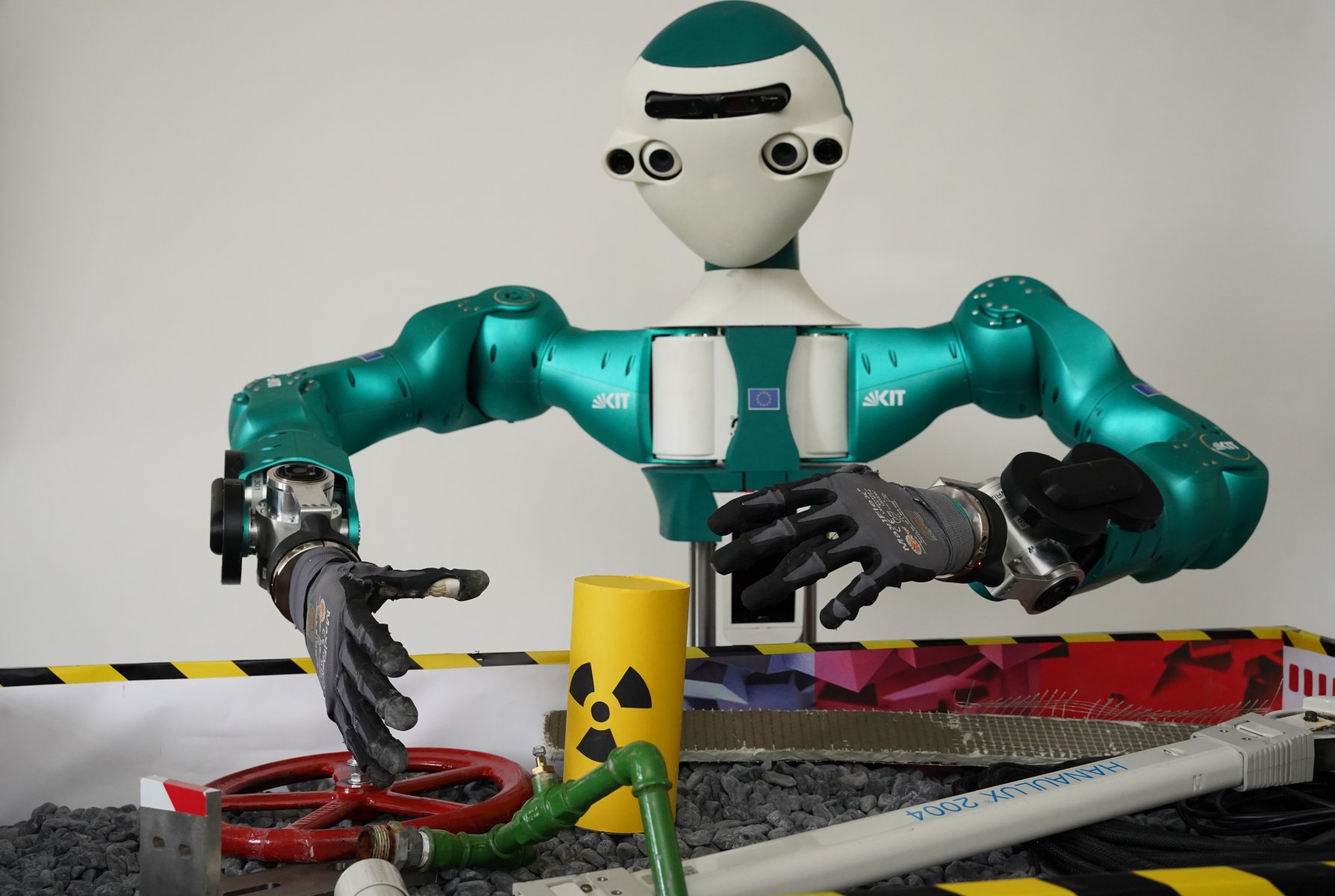
The Chair of High Performance Humanoid Technologies (H2T, Prof. Asfour) at the Institute of Anthropomatics and Robotics (IAR) of the KIT researches and develops humanoid robot technologies and systems that perform tasks in interaction and cooperation with humans. The main research topics include the engineering of humanoid robots, visually and haptically supported gripping and mobile manipulation, learning from human observation and personal experience, and the mechano-informatics of humanoid robots as the synergetic integration of methods of mechatronics, computer science, and artificial intelligence for the realization of humanoid robotic systems.
Research focus of H2T in ROBDEKON
The research focus of H2T within the ROBDEKON Competence Center is on the development of methods for single and multi-handed gripping, mobile manipulation and the planning of manipulation actions for handling contaminated objects. The visual perception and autonomous execution of decontamination tasks are central issues in this context. The methods developed for this purpose are tested on a humanoid robot in the context of the decontamination scenario. This includes the grasping and manipulation of contaminated objects, the geometric detection of objects as well as the decontamination of facility components.
Current focal points of the work are
- the detection of success and failure in grasping and manipulation tasks,
- the mobile packaging in unknown environments,
- automatic modeling of objects, and coverage planning for robotic cleaning.
Chair for Intelligent Process Automation and Robotics (IPR)
At the Chair for Intelligent Process Automation and Robotics (IPR) at the Institute for Anthropomatics and Robotics (IAR) of KIT, a young team of scientists is working on current research questions of machine learning for robots, safe human-robot collaboration, path planning and control for robots, and medical robotics. Our application domains range from the industrial to the domestic and clinical context.

Research focus of IPR in ROBDEKON
The IPR conducts research within the framework of ROBDEKON under the direction of Prof. Dr.-Ing. habil. Björn Hein, the IPR is working on the further development of the system for the automatic decontamination and release measurement of building structures, which was developed in preliminary work together with the Institute for Technology and Management in Construction (TMB). A second area of focus is the development of a new system for decontamination and release measurement of removed parts and plant components based on industrial robots. We also develop algorithms for trajectory generation under boundary conditions as well as methods for sensor fusion and sensor deployment planning.
In response to requirements from industry, the development of an autonomous mobile environmental sensing platform that can autonomously explore nuclear power plants geometrically and perform ODL radiation measurements was pursued, deviating slightly from the original plan. Among other things, a 3D exploration algorithm with a next-best-view approach was developed for this purpose. Regarding the handling of large plant components, the development of an algorithm for voxel-based acquisition of large plant components was initiated. A major challenge is the accessibility of all areas of the plant parts. In the last part of the first phase of ROBDEKON, this challenge is tackled by combining an industrial robot with other kinematics (e.g. turntable).
Chair for Intelligent Sensor-Actuator-Systems (ISAS)
The Chair of Intelligent Sensor-Actuator-Systems (ISAS) under the direction of Prof. Dr.-Ing. Uwe D. Hanebeck has 20 years of experience in the field of stochastic state and parameter estimation. Research topics are efficient methods for nonlinear state estimation, methods for simultaneous identification and estimation of uncertain model parameters or system states, filter methods based on systematic approximation methods of probability densities, and tracking methods for tracking extended objects as well as for simultaneous tracking of multiple objects. In addition, research is being conducted on techniques for highly immersive telepresence using virtual and augmented reality (VR/AR) methods in combination with haptic feedback.
Research focus of the ISAS in ROBDEKON
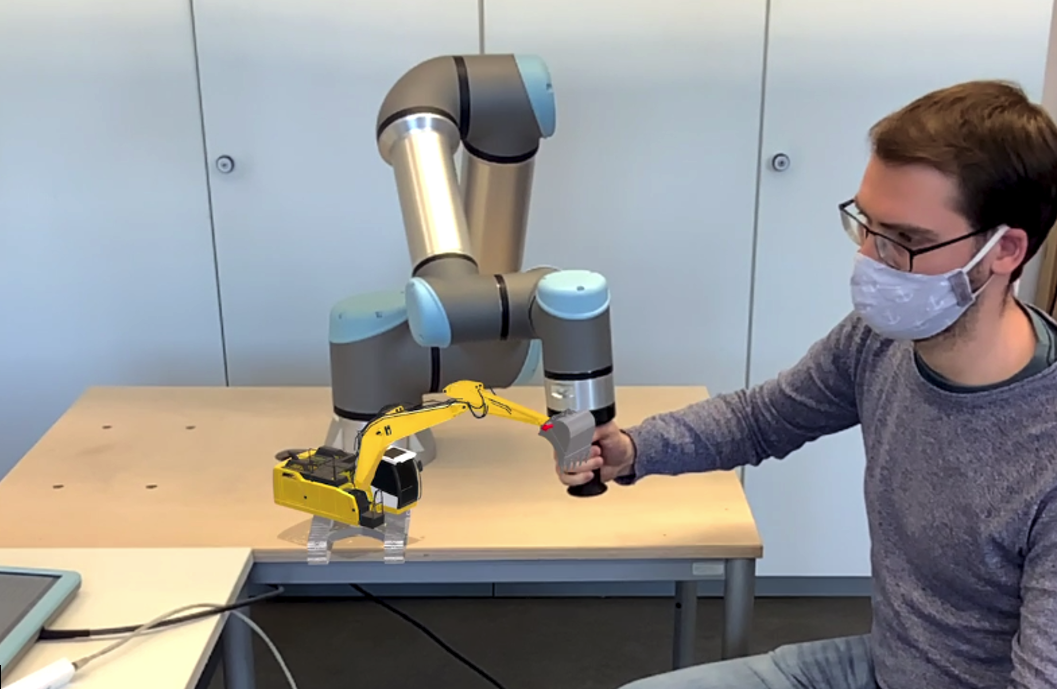
The Chair of Intelligent Sensor-Actuator-Systems (ISAS) develops telepresence technologies for the intuitive control of remote robotic systems. The universally applicable VR/AR platform created for this purpose enables the display of sensor data, which is generated either directly or by means of in-house algorithms for the reconstruction of contamination concentrations. In addition, research is being conducted on intuitive control concepts that accept natural walking, head and hand movements as input and simultaneously provide haptic feedback in the form of forces and moments. For this purpose, ISAS is also working on the development of large-scale haptic interfaces.
In the course of the research work carried out so far, important results have already been achieved: The visualization platform published under the name iviz already enables platform-independent ROS compatibility and generated great interest among experts. By combining it with a teleoperation interface specified at ISAS, it is possible to control a wide variety of robots. In addition, two new intuitive methods for robot control based on haptic feedback were developed. A new adaptive reconstruction method for distributions allows area sampling with fewer samples while maintaining the same accuracy compared to classical methods.
Department of Dismantling of Conventional and Nuclear Structures
The main research focus of the Institute of Technology and Management in Construction (TMB) is the entire field of machinery in construction and construction operations as a whole. The department "Dismantling of Conventional and Nuclear Structures" can therefore draw on a broad range of expertise in the field of nuclear dismantling with regard to the processes and techniques used in civil engineering. By additionally taking into account the special features of nuclear engineering, the know-how of all divisions is bundled. One focus is on mechanical engineering for decontamination work.

Research focus of the TMB in ROBDEKON
At the TMB, a large-scale living lab is being built in which the latest robotic systems for environmental and contamination detection as well as autonomous decontamination robots for nuclear power plants will be tested under realistic conditions. Within the living lab, students, scientists and representatives from industry and technology will be able to test various scenarios and perform telemanipulation. In addition, new methods and devices will be investigated that can be used on landfills or contaminated sites.
At the TMB, the following goals were pursued and successfully implemented: First, the focus was on sensing of the wall surface. A robot platform was developed for unknown environment detection in cooperation with KIT-IPR. This platform produces a point cloud for geometric registration of a building. In addition, the local radioactivity (during the dismantling of nuclear power plants) is measured. Based on the point cloud, a BIM model is created semi-automatically, with which a digital planning of the work steps can be realized using the BIM platform. To further investigate radioactive contamination on concrete walls, a contamination array was developed. In addition, two concepts were developed and implemented for decontamination of the wall surface using a milling machine. To automate the system, the contamination array and the milling tool, different measurement techniques and sensors such as laser distance sensor were used.