Karlsruher Institut für Technologie (KIT)
Als »Die Forschungsuniversität in der Helmholtz-Gemeinschaft« schafft und vermittelt das KIT Wissen für Gesellschaft und Umwelt. Ziel ist es, zu den globalen Herausforderungen maßgebliche Beiträge in den Feldern Energie, Mobilität und Information zu leisten. Dazu arbeiten rund 9300 Mitarbeiterinnen und Mitarbeiter auf einer breiten disziplinären Basis in Natur-, Ingenieur-, Wirtschafts- sowie Geistes- und Sozialwissenschaften zusammen. Seine 25100 Studierenden bereitet das KIT durch ein forschungsorientiertes universitäres Studium auf verantwortungsvolle Aufgaben in Gesellschaft, Wirtschaft und Wissenschaft vor. Die Innovationstätigkeit am KIT schlägt die Brücke zwischen Erkenntnis und Anwendung zum gesellschaftlichen Nutzen, wirtschaftlichen Wohlstand und Erhalt unserer natürlichen Lebensgrundlagen.
Lehrstuhl für Hochperformante Humanoide Technologien (H2T)
Der Lehrstuhl für Hochperformante Humanoide Technologien (H2T, Prof. Asfour) am Institut für Anthropomatik und Robotik (IAR) des KIT erforscht und entwickelt humanoide Robotertechnologien und -systeme, die Aufgaben in Interaktion und Kooperation mit dem Menschen durchführen. Die Forschungsschwerpunkte umfassen das Engineering humanoider Roboter, das visuell und haptisch gestützte Greifen und die mobile Manipulation, das Lernen aus Beobachtung des Menschen und aus eigener Erfahrung, sowie die Mechano-Informatik humanoider Roboter als die synergetische Integration von Methoden der Mechatronik, Informatik und künstlichen Intelligenz, zur Realisierung humanoider Robotersysteme.
Forschungsschwerpunkt des H2T in ROBDEKON
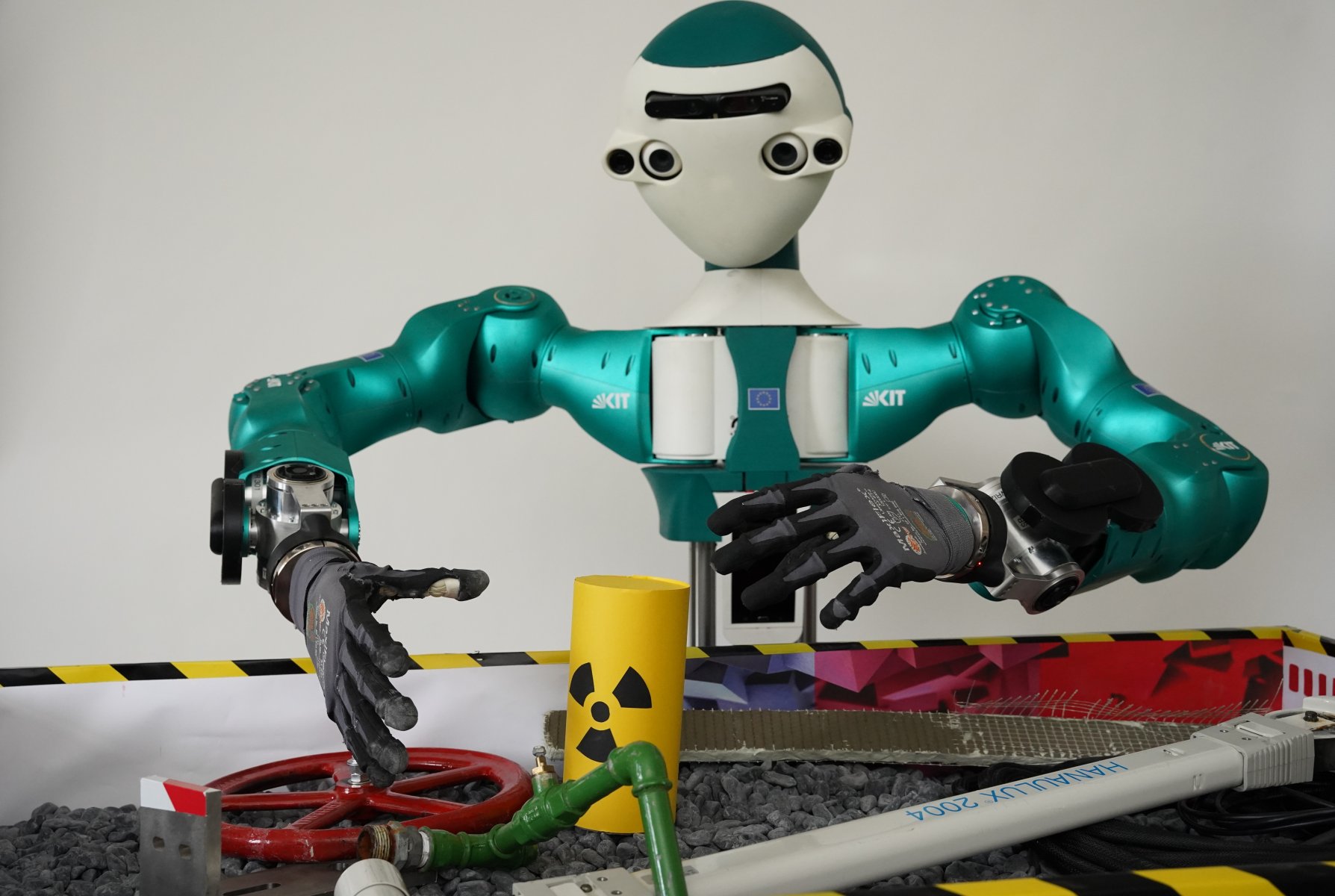
Die Forschungsschwerpunkte des H2T innerhalb des Kompetenzzentrums ROBDEKON liegen in der Entwicklung von Methoden für das ein- und mehrhändige Greifen, die mobile Manipulation und die Planung von Manipulationsaktionen zur Handhabung kontaminierter Objekte. Dabei stellen die visuelle Wahrnehmung und autonome Ausführung von Dekontaminationsaufgaben zentrale Fragestellungen dar. Die hierzu entwickelten Methoden werden an einem humanoiden Roboter im Kontext des Dekontaminationsszenario erprobt. Dieser umfasst das Greifen und Manipulieren kontaminierter Objekte, die geometrische Erfassung von Objekten und die Dekontamination von Anlagenteile.
Aktuelle Schwerpunkte der Arbeiten sind
- das Erkennen von Erfolg und Fehler bei Greif- und Manipulationsaufgaben,
- die mobile Manipulation in unbekannten Umgebungen,
- das automatische Modellieren von Objekten und die Abdeckungsplanung für die robotergestützte Reinigung.
Lehrstuhl für Intelligente Prozessautomation und Robotik (IPR)
Am Lehrstuhl für Intelligente Prozessautomation und Robotik (IPR) am Institut für Anthropomatik und Robotik (IAR) des KIT arbeitet ein junges Team von Wissenschaftlern an aktuellen Forschungsfragen des Maschinellen Lernens für Roboter, der sicheren Mensch-Roboter-Kollaboration, der Bahnplanung und Regelung für Roboter, sowie der Medizinrobotik. Unsere Anwendungsdomänen erstrecken sich hierbei vom industriellen, über den häuslichen bis hin zum klinischen Kontext.
Forschungsschwerpunkt des IPR in ROBDEKON
Das IPR forscht im Rahmen von ROBDEKON unter der Leitung von Prof. Dr.-Ing. habil. Björn Hein an der Weiterentwicklung des gemeinsam mit dem Institut für Technologie und Management im Baubetrieb (TMB) in Vorarbeiten entwickelten Systems zur automatischen Dekontamination und zum Freimessen von Gebäudestrukturen. Ein zweiter Schwerpunkt ist die Neuentwicklung eines Systems zur Dekontamination und zum Freimessen von Ausbauten und Anlagenteilen auf Basis von Industrierobotern. Dabei werden Algorithmen zur Trajektoriengenerierung unter Randbedingungen sowie Verfahren zur Sensorfusion und Sensoreinsatzplanung entwickelt.
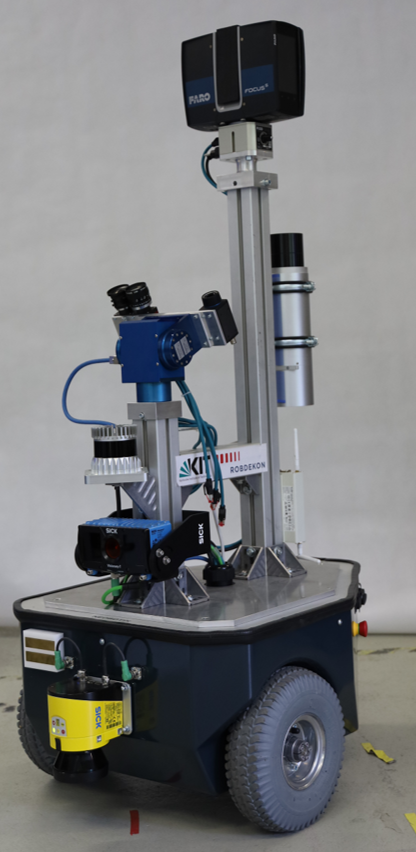
Als Reaktion auf Anforderungen aus der Industrie wurde leicht abweichend von der ursprünglichen Planung die Entwicklung einer autonomen mobilen Umwelterfassungsplattform, die autonom Kernkraftwerke geometrisch dokumentieren und ODL-Strahlungsmessungen durchführen kann, vorangetrieben. Hierfür wurde unter anderem ein 3D-Explorationsalgorithmus mit Next-Best-View-Ansatz entwickelt. Hinsichtlich des Handlings großer Anlagenteile wurde die Entwicklung eines Algorithmus zur voxelbasierten Erfassung von großen Anlagenteilen forciert. Eine große Herausforderung besteht in der Erreichbarkeit aller Bereiche der Anlagenteile. Hier soll insbesondere im letzten Teil der ersten Phase von ROBDEKON die schwierige Erreichbarkeit durch Kombination eines Industrieroboters mit weiteren Kinematiken (z.B. Drehtisch) gelöst werden.
Lehrstuhl für Intelligente Sensor-Aktor-Systeme (ISAS)
Der Lehrstuhl für Intelligente Sensor-Aktor-Systeme (ISAS) unter der Leitung von Prof. Dr.-Ing. Uwe D. Hanebeck verfügt über 20 Jahre Erfahrung im Bereich der stochastischen Zustands- und Parameterschätzung. Gegenstand der Forschung sind effiziente Verfahren zur nichtlinearen Zustandsschätzung, Verfahren zur simultanen Identifikation und Schätzung unsicherer Modellparameter bzw. Systemzustände, Filtermethoden, die auf systematischen Approximationsmethoden von Wahrscheinlichkeitsdichten beruhen, und Trackingmethoden zur Verfolgung ausgedehnter Objekte sowie zur simultanen Verfolgung mehrerer Objekte. Darüber hinaus wird an Techniken zur hoch immersiven Telepräsenz unter Einsatz von Methoden der virtuellen und erweiterten Realität (VR/AR) in Kombination mit haptischem Feedback geforscht.
Forschungsschwerpunkt des ISAS in ROBDEKON
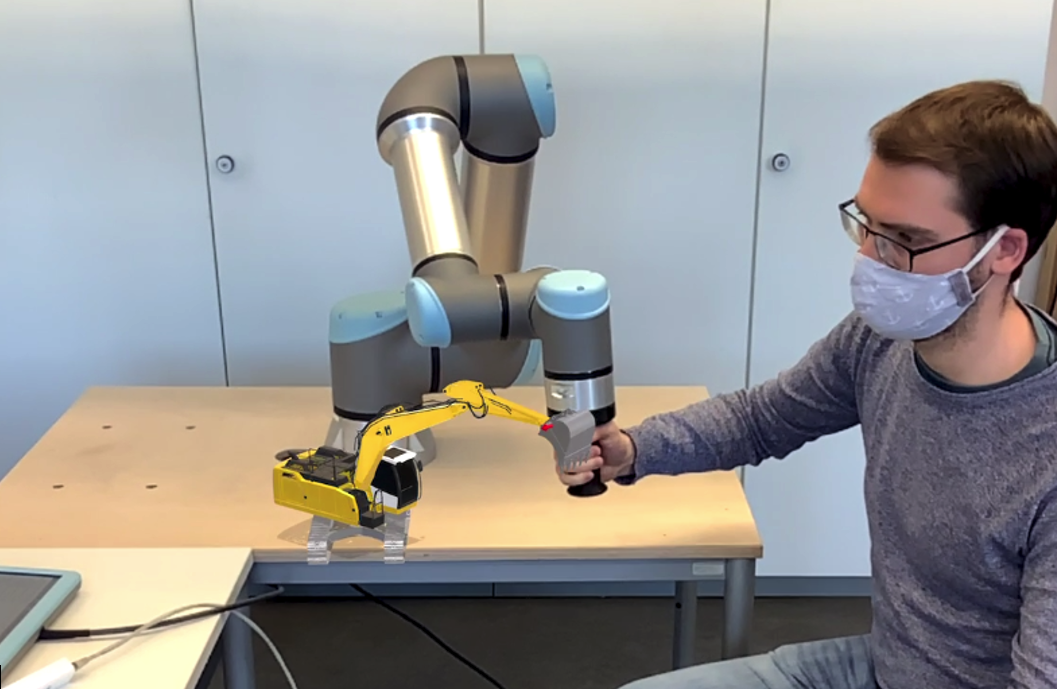
Der Lehrstuhl für Intelligente Sensor-Aktor-Systeme (ISAS) entwickelt Telepräsenztechnologien für die intuitive Steuerung von entfernten Robotersystemen. Die hierfür geschaffene, universell einsetzbare VR/AR-Plattform ermöglicht die Darstellung von Sensordaten, welche entweder direkt oder mittels eigener Algorithmen zur Rekonstruktion von Kontaminationsverteilungen erzeugt werden. Zusätzlich wird an intuitiven Steuerungskonzepten geforscht, die natürliche Lauf-, Kopf- und Handbewegungen als Eingabe akzeptieren und gleichzeitig haptisches Feedback in Form von Kräften und Momenten liefern. Hierfür wird am ISAS auch an der Entwicklung großräumiger haptischer Schnittstellen gearbeitet.
Im Zuge der bisher durchgeführten Forschungsarbeiten konnten bereits wichtige Ergebnisse erzielt werden: Die unter dem Namen iviz veröffentlichte Visualisierungsplattform ermöglicht bereits jetzt plattformunabhängige ROS-Kompatibilität und sorgte für großes Interesse in der Fachwelt. Durch die die Kombination mit einer am ISAS spezifizierten Teleoperationsschnittstelle ist so die Steuerung verschiedenster Roboter möglich. Darüber hinaus wurden zwei neue, intuitive Verfahren zur Robotersteuerung basierend auf haptischem Feedback entwickelt. Ein neues, adaptives Rekonstruktionsverfahren für Verteilungen erlaubt eine Flächenbeprobung mit weniger Proben bei gleicher Genauigkeit gegenüber klassischen Verfahren.
Fachbereich Rückbau konventioneller und kerntechnischer Bauwerke
Forschungsschwerpunkte des Instituts für Technologie und Management im Baubetrieb (TMB) bilden das gesamte maschinentechnische Gebiet im Bauwesen und der Baubetrieb. Der Fachbereich »Rückbau konventioneller und kerntechnischer Bauwerke« kann daher bei Forschungsarbeiten im kerntechnischen Rückbau auf eine breit gefächerte Expertise hinsichtlich der Verfahren und Techniken aus dem Bauwesen zurückgreifen. Durch die zusätzliche Berücksichtigung der Besonderheiten in der Kerntechnik, wird das Know-how aller Sparten gebündelt. Ein Fokus liegt auf der Maschinentechnik für Dekontaminationsarbeiten.

Forschungsschwerpunkt des TMB in ROBDEKON
Am TMB entsteht ein großformatiges Living-Lab, in dem realitätsnah die neusten Robotersysteme für Umwelt- und Kontaminationserfassung sowie autonome Dekontaminationsroboter für Kernkraftwerke erprobt werden. Innerhalb des Living-Labs wird es Studierenden, Wissenschaftlern und Vertretern aus Wirtschaft und Technik möglich sein verschiedenste Szenarien zu erproben und Telemanipulationen auszuführen. Zusätzlich werden neue Methoden und Geräte untersucht, die auf Deponien oder belasteten Arealen eingesetzt werden können.
Am TMB wurden folgende Ziele verfolgt und erfolgreich umgesetzt: Zuerst wurde der Fokus auf die Umgebungserfassung der Wandoberfläche gelegt. Eine Roboterplattform wurde für unbekannte Umgebungserfassung im Kooperation mit KIT-IPR entwickelt. Dadurch wird eine Punktwolke für die geometrische Erfassung eines Gebäudes erstellt. Zudem wird die Ortsdosisleistung (beim Rückbau von Kernkraftwerken) gemessen. Aufbauend auf der Punktwolke wird ein BIM Model teilautomatisch erstellt, mit dem eine digitalen Planungen der Arbeitsschritte mittels BIM Plattform realisiert werden. Um radioaktive Kontamination an Betonwänden weiter zu untersuchen, wurde ein Kontaminationsarray entwickelt. Für die Dekontamination der Wandoberfläche wurden zwei Konzepte mittels Fräse entwickelt und implementiert. Um das System, das Kontaminationsarray und das Fräswerkzeug, zu automatisieren, wurden verschiedene Messtechniken und Sensoren wie z.B. Laserabstandssensor verwendet.