Labore
Die Partner von ROBDEKON bringen verschiedene Prüfstände und Labore in das Kompetenzzentrum ein. Diese wurden im Laufe des Projektes kontinuierlich erweitert und ausgebaut und dienen als Basis für die Entwicklung und Evaluierung von Technologie-Demonstratoren.

Baumaschinenlabor am Fraunhofer IOSB
Das Baumaschinenlabor am IOSB besteht aus der ROBDEKON-Halle mitsamt einem Außengelände für Tests. Hier gehen Systementwicklung und Verifikation in der Realität Hand in Hand.
Weiterlesen …
Baumaschinenlabor am DFKI
Das Outdoor Living Lab ist eine Außenanlage mit freien Gestaltungsmöglichkeiten. Auf einer Fläche von ca. 900 m² lassen sich unterschiedlichste Hindernisse und Szenarien zur Leistungsüberprüfung von Robotersystemen aufbauen.
Weiterlesen …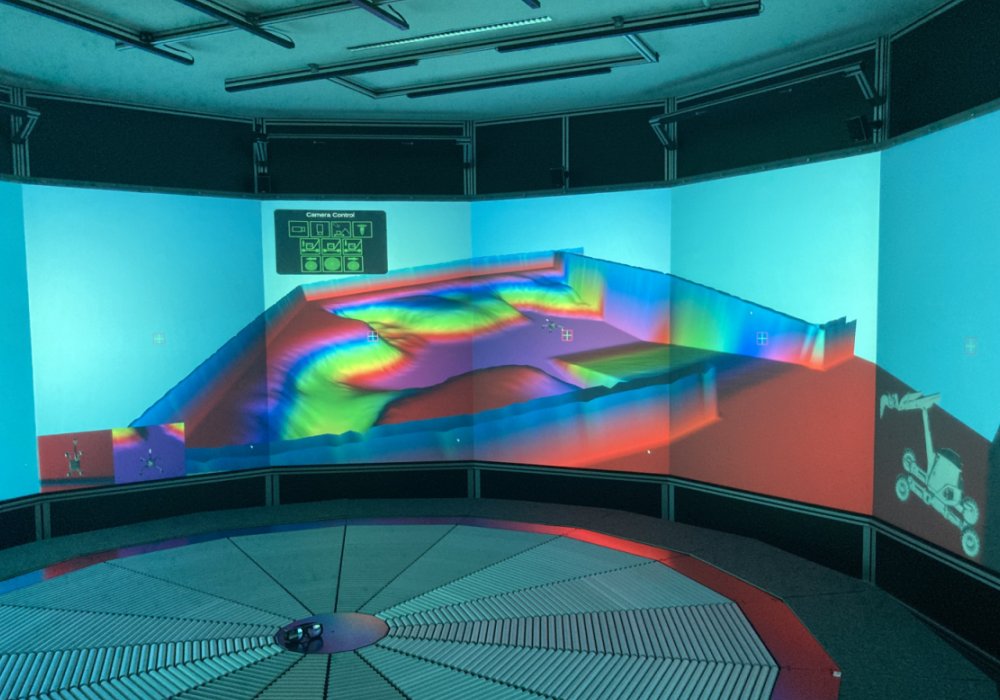
Teleoperationslabor am DFKI
Das Teleoperationslabor – auch »CAVE« genannt – ist eine immersive, interaktive 3D-Testumgebung.
Weiterlesen …
Manipulationslabor am FZI
Im Labor Manipulation am FZI wird an zwei ROBDEKON Demonstratoren geforscht und entwickelt.
Weiterlesen …
Manipulationslabor am KIT-H2T
Der humanoide Roboter ARMAR-6 demonstriert seine kognitiven und sensomotorischen Fähigkeiten im Kontext der autonomen Handhabung unbekannter Objekte am Beispiel eines exemplarischen Dekontaminationsszenarios.
Weiterlesen …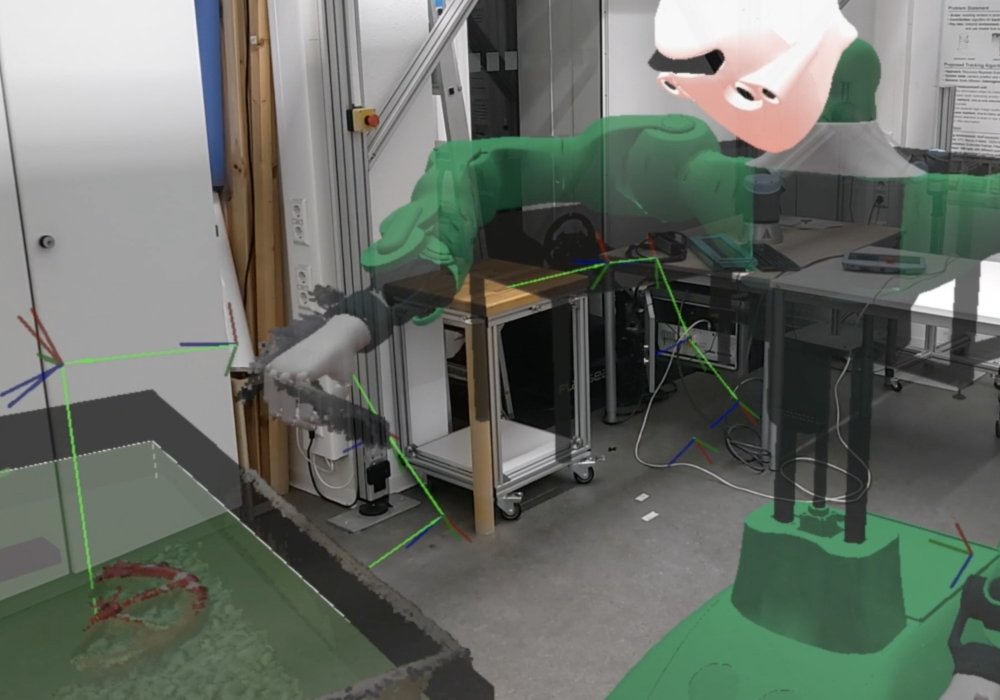
Telepräsenzlabor am KIT-ISAS
Im Telepräsenzlabor »Holodeck« des Lehrstuhls für Intelligente Sensor-Aktor-Systeme steht ein Querschnitt aktueller Hardware aus dem Bereich VR/AR zur Verfügung inklusive Tracking-System zur Verfügung.
Weiterlesen …
Rückbaulabor am KIT-TMB
Das KIT-TMB wird hierzu unter anderem in thematisch fokussierten Laboren und realistischen Testumgebungen (Living-Labs) Forschungsinfrastruktur zur Verfügung stellen.
Weiterlesen …