Baumaschinenlabor am Fraunhofer IOSB
Das Baumaschinenlabor am Fraunhofer IOSB besteht aus der ROBDEKON-Halle mitsamt einem Außengelände für Tests. Schwerpunkt der Forschungsarbeiten ist die Befähigung von schweren Baumaschinen zu autonomem Agieren. Dazu werden die Maschinen um die notwendige Sensorik erweitert und mit Algorithmen befähigt, (Teil-)Aufgaben autonom zu lösen. Hier gehen Systementwicklung und Verifikation in der Realität Hand in Hand.
Die ROBDEKON-Halle liegt auf dem Institutsgelände des Fraunhofer IOSB und bietet so einen schnellen Zugriff auf die Robotersysteme. Sie ist direkt an das Freigelände angeschlossen, so dass mit den Baumaschinen direkt in Stellplatznähe niedrigschwellig getestet werden kann. Neben üblichen Bildschirmarbeitsplätzen und Werkzeugen ist umfangreiche Infrastruktur (z. B. Starkstromanschlüsse) vorhanden. Insbesondere bietet die ROBDEKON-Halle eine schnelle Anbindung ans Institutsnetz, so dass über das ROBDEKON-VPN schneller Zugriff auf die Robotersysteme möglich ist. Zudem bietet das Baumaschinenlabor am Fraunhofer IOSB ein WLAN-Mesh um verschiedene Systeme über größere Abstände im Freien drahtlos verbinden zu können. Die Halle ist beheizt und erlaubt damit rund ums Jahr Arbeiten an den Systemen.

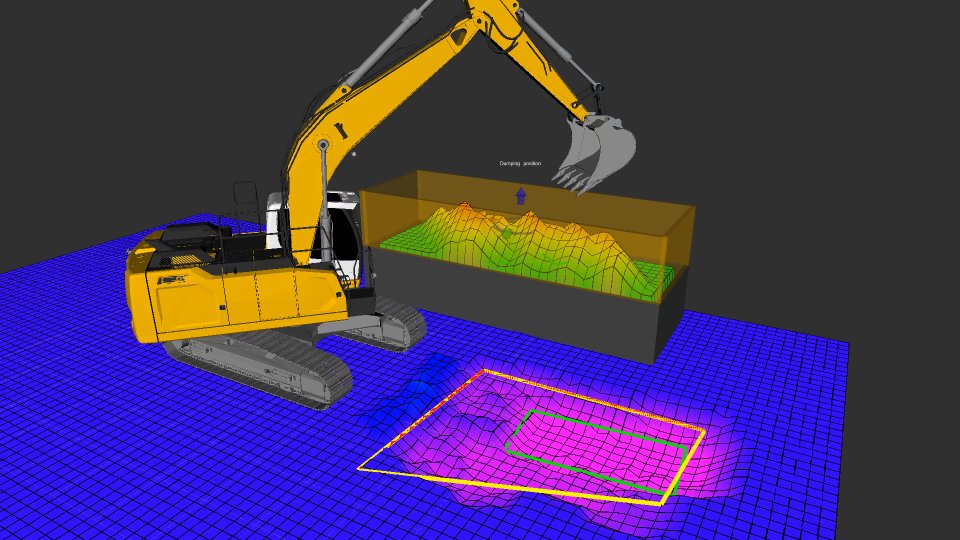
Im Rahmen von ROBDEKON stehen ein automatisierter Liebherr R924 Kettenbagger (24t) und ein kleiner automatisierter Bagger der 2t-Klasse zur Verfügung. Die Bagger sind mit Sensorik zur Umfelderfassung (u. a. Lidare, Kameras) und zur Eigenbewegungserfassung (GNSS, Inertialeinheiten, Gelenkwinkelencoder) ausgerüstet. Die Maschinen sind algorithmisch per Software ansteuerbar und erlauben dadurch die Entwicklung von Autonomiefunktionen.



Das Living Lab bietet
- Beratung hinsichtlich der Fähigkeiten und Sensorausstattung autonomer Systeme
- Hilfe zur Einschätzung der Potentiale maschineller Intelligenz
- Unterstützung bei der Umsetzung spezifischer Anwendungsfälle
- Erprobung von Systemen