Labor Manipulation am FZI
Im Labor Manipulation am FZI wird an zwei ROBDEKON Demonstratoren geforscht und entwickelt. Der Demonstrator „Rückholen von Gefahrenstoffen“ kann teleoperiert oder autonom durch unbekanntes Gelände navigieren und dabei lokalisierte Objekte durch Shared-Autonomy Strategien aufnehmen. Am Demonstrator „Sortieren vom Band“ werden verschiedene Objekte, z.B. Batterien, autonom klassifiziert und im Anschluss durch einen Manipulator sortiert. Darüber hinaus verfügt das FZI „Living Lab Service Robotics“ über eine große Ausstattung mit verschiedenen Roboterarmen, zahlreichen Greifern und menschenähnlichen Händen sowie mobilen, autonomen Robotersystemen. Das Lab bietet viele Möglichkeiten für hardwarenahe Entwicklungen, Machbarkeitsstudien und reale Experimente.


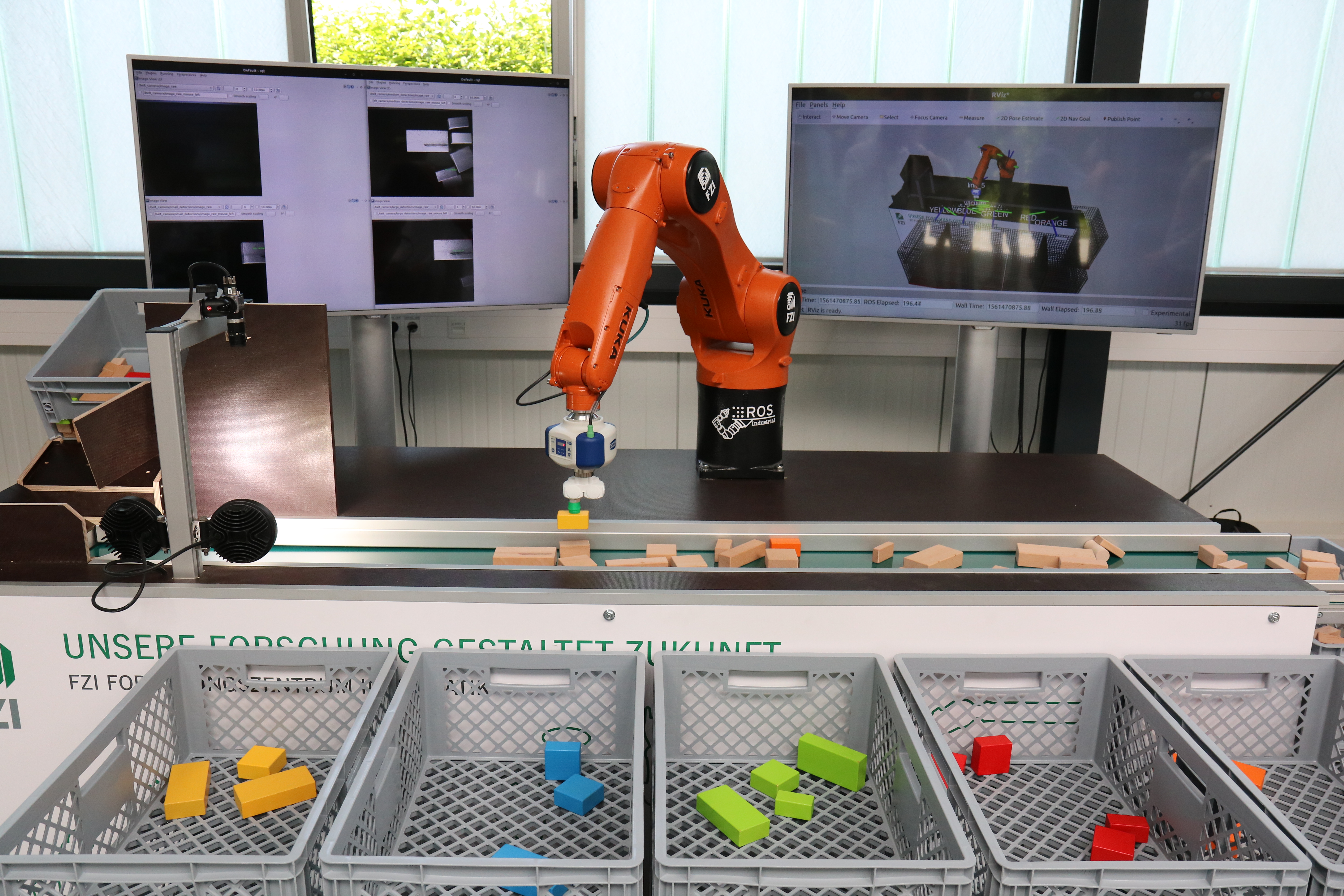
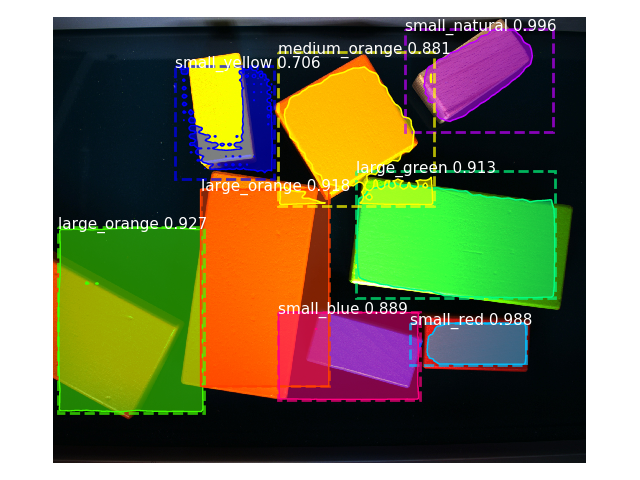
Als mobile Plattform dient ein geländegängiger Clearpath Husky mit einem UR5 Roboterarm. Der Manipulator verfügt zusätzlich über einen Kraft-Momenten Sensor, eine RGBD-Kamera sowie eine 3-Finger Hand zum robusten Greifen unbekannter Objekte. Für die Teleoperation sowie autonome Navigation ist ein 32-Zeilen LiDaR, eine 360° Kamera für die Rundumsicht sowie ein D-GPS Modul verbaut. Die Kommunikation mit dem Leitstand ist über eine performante sowie eine Langstrecken WLAN-Verbindung gewährleistet. Der Leitstand ist mit sechs Monitoren sowie zwei Rechnersystem zur Visualisierung der Sensordaten, Lokalisierung von Objekten sowie einer UI zur Kommandierung ausgerüstet. Der Demonstrator „Sortieren vom Band“ ist mit einem 2,5 x 0,3 m Förderband ausgestattet. Objekte werden über einen Ein-Zeilen-LiDaR sowie eine Global-Shutter Kamera klassifiziert und lokalisiert. Die Manipulation und Sortierung der Objekte wird durch einen Industrie-Roboterarm mit einem pneumatisch angesteuerten Magnetgreifer oder einem Sauggreifer durchgeführt.