Manipulation LAB at FZI
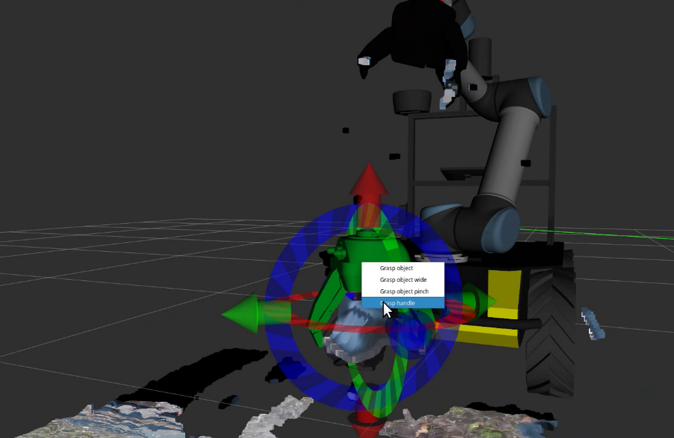
In the Manipulation laboratory at FZI, research and development is being carried out on two ROBDEKON demonstrators. The demonstrator "Retrieval of Hazardous Materials" can navigate teleoperated or autonomously through unknown terrain, picking up localized objects through shared autonomy strategies. At the demonstrator "Sorting from Conveyor", different objects, e.g. batteries, are classified autonomously and subsequently sorted by a manipulator. In addition, the FZI "Living Lab Service Robotics" has a large equipment with different robotic arms, numerous grippers and human-like hands as well as mobile autonomous robotic systems. The Lab offers many opportunities for hardware-related developments, feasibility studies and real experiments.


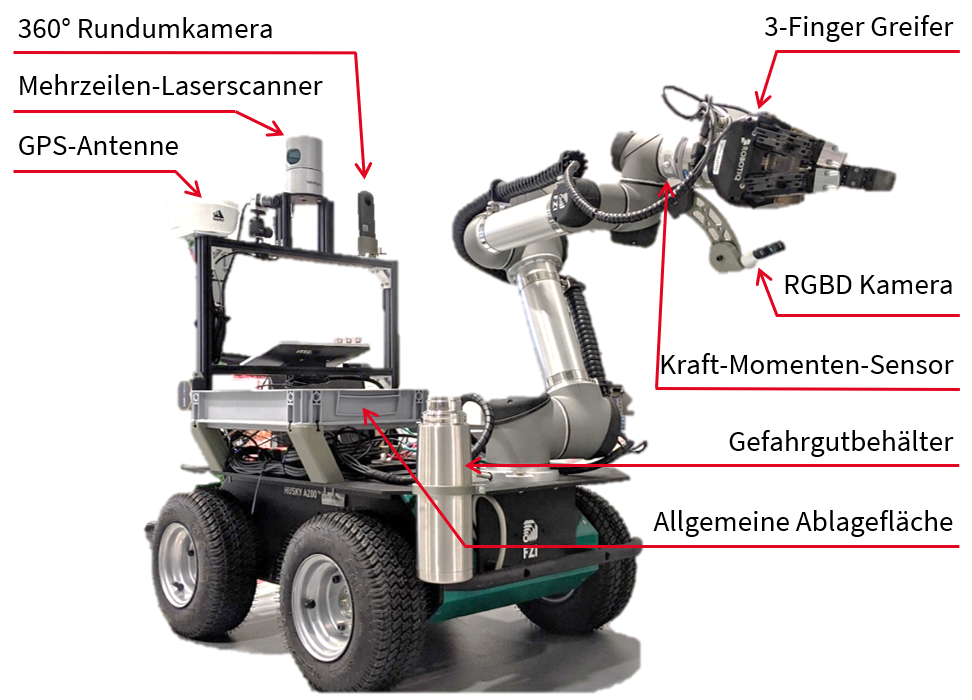
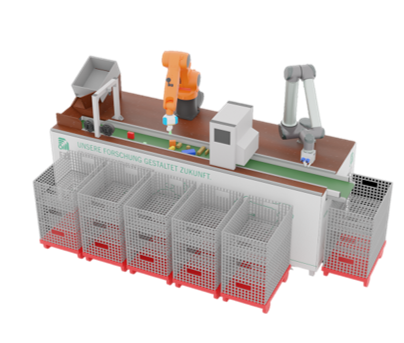
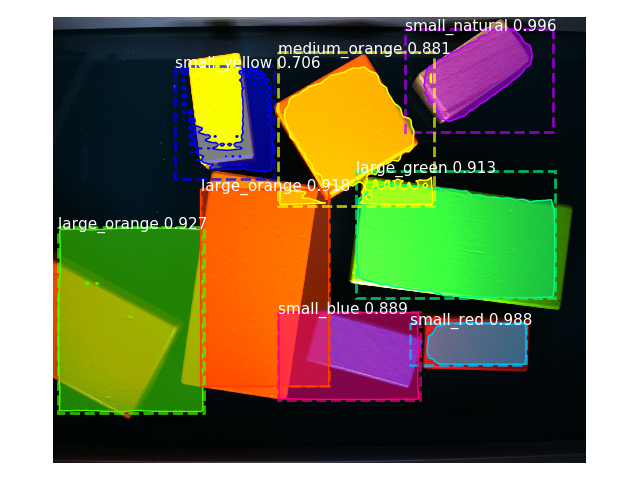
An all-terrain Clearpath Husky with an UR5 robotic arm serves as the mobile platform. The manipulator is additionally equipped with a force-torque sensor, an RGBD camera and a 3-finger hand for robust gripping of unknown objects. For teleoperation and autonomous navigation, a 32-line LiDaR, a 360° camera for all-round vision and a D-GPS module are installed. Communication with the control station is ensured via a high-performance and long-range WLAN connection. The control station is equipped with six monitors and two computer systems for visualization of sensor data, localization of objects and a UI for command and control. The demonstrator "Sorting from Conveyor" is equipped with a 2.5 x 0.3 m conveyor belt. Objects are classified and localized using a single-line LiDaR as well as a global shutter camera. The manipulation and sorting of the objects is performed by an industrial robot arm with a pneumatically controlled magnetic gripper or a suction gripper.