· News
iviz: an App for visualization and teleoperation of robots in AR and VR
KIT releases the newly developed app »iviz« for visualization and teleoperation of robots using virtual and augmented reality.
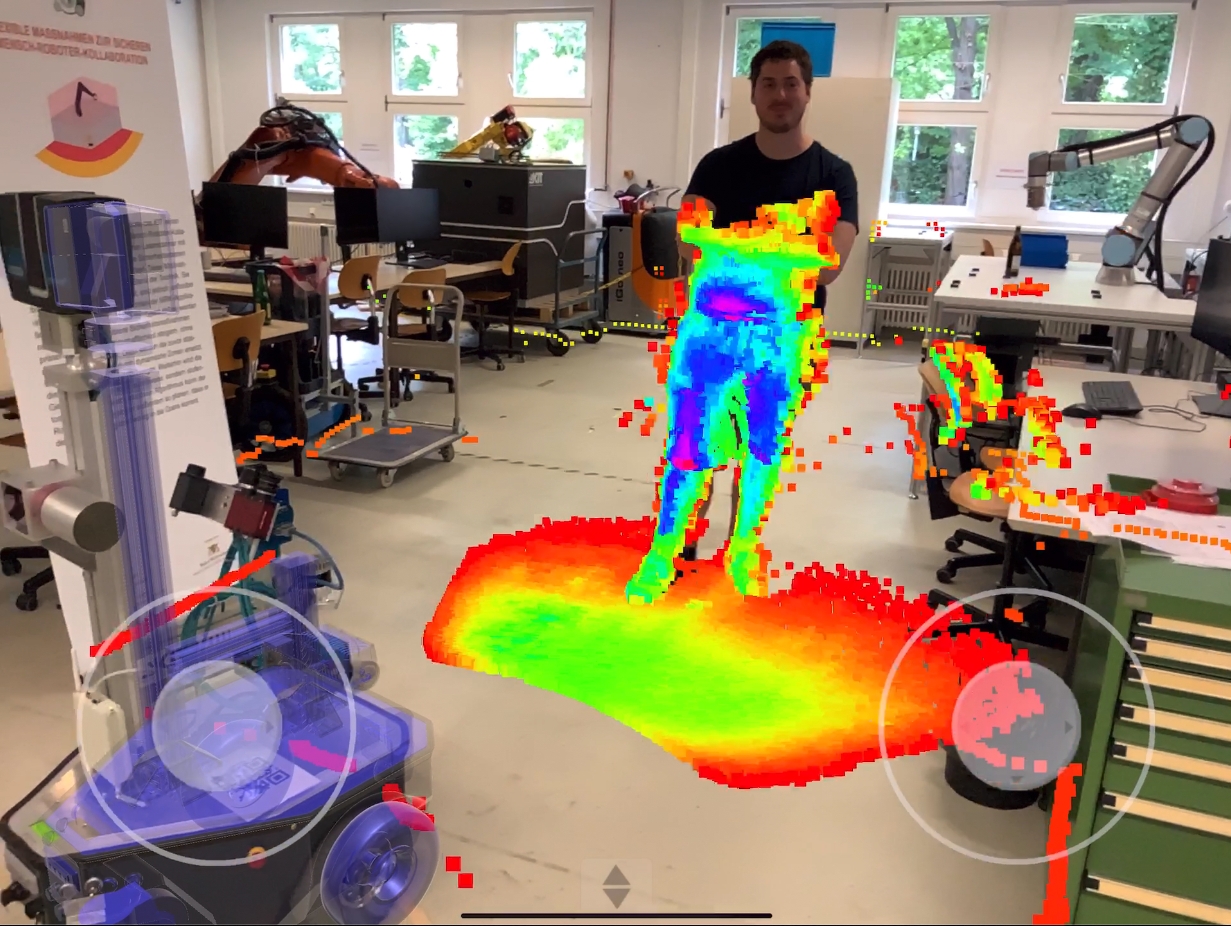
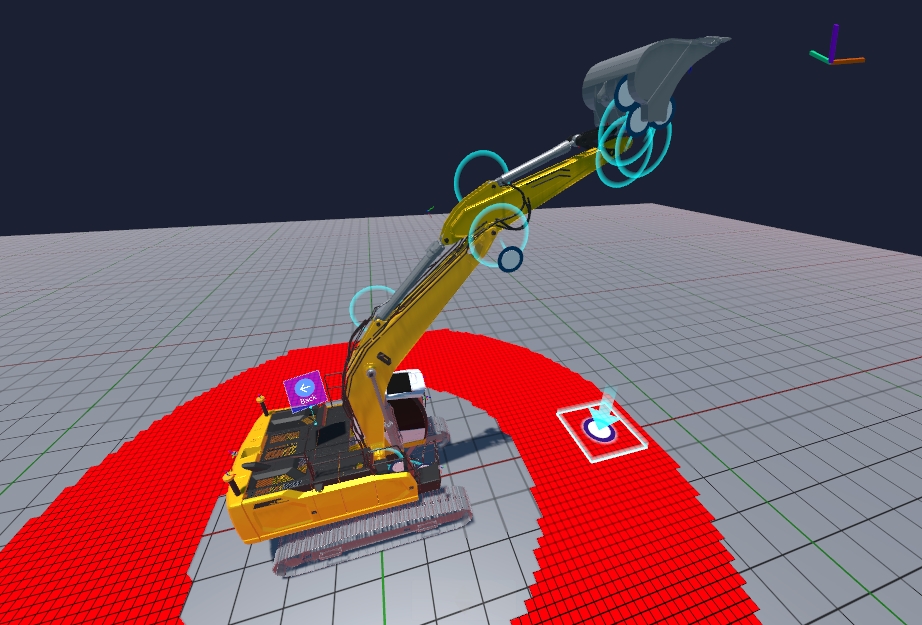
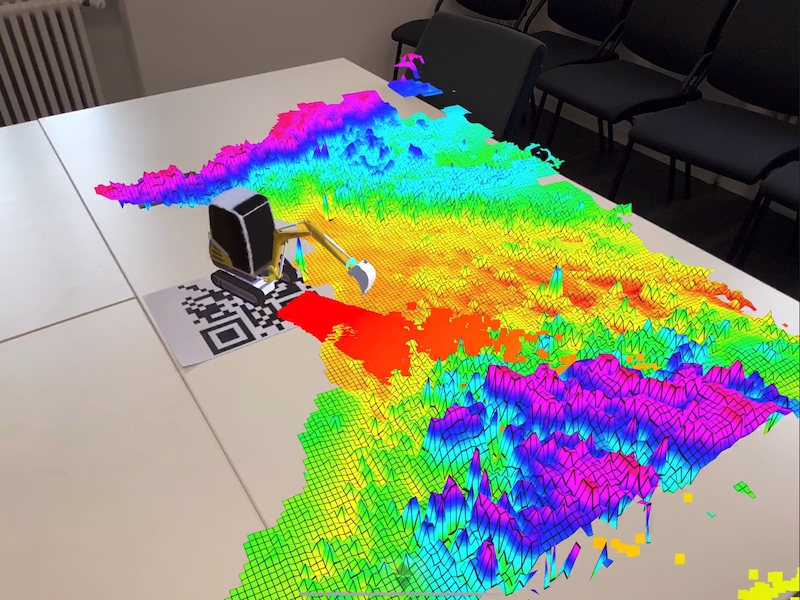
A wide variety of robotic systems are used as part of the decontamination tasks in ROBDEKON, ranging from small platforms and humanoid robots to large 20-ton excavators. However, these robots are not allowed to be operated on site because the contaminants being treated are dangerous to human operators. Therefore, novel methods for teleoperation of remote robots are being developed in ROBDEKON, fusing technologies such as augmented and virtual reality with (semi-)autonomy algorithms from robotics and machine learning.
The app »iviz« arose from the challenge of visualizing and teleoperating spatially separated robot components that communicate with each other using the Robot Operating System (ROS) in a shared virtual world. It should not matter whether the user is sitting at a desktop PC, working in a VR environment, or wearing AR data goggles.
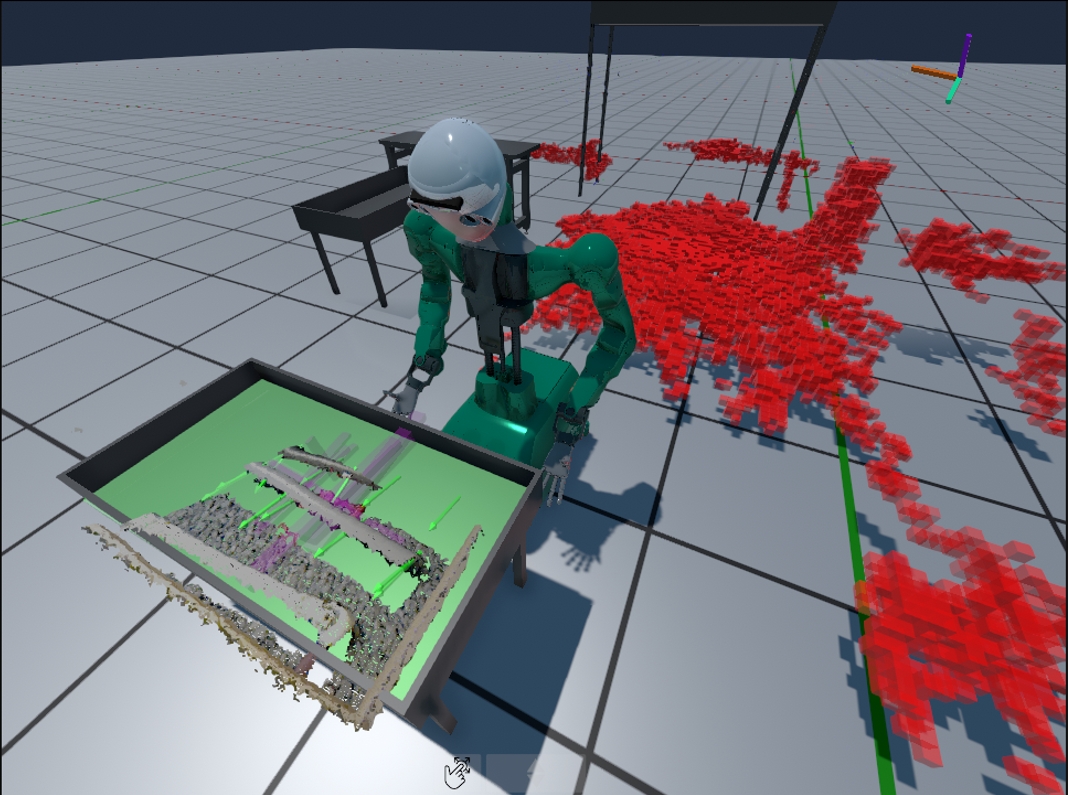
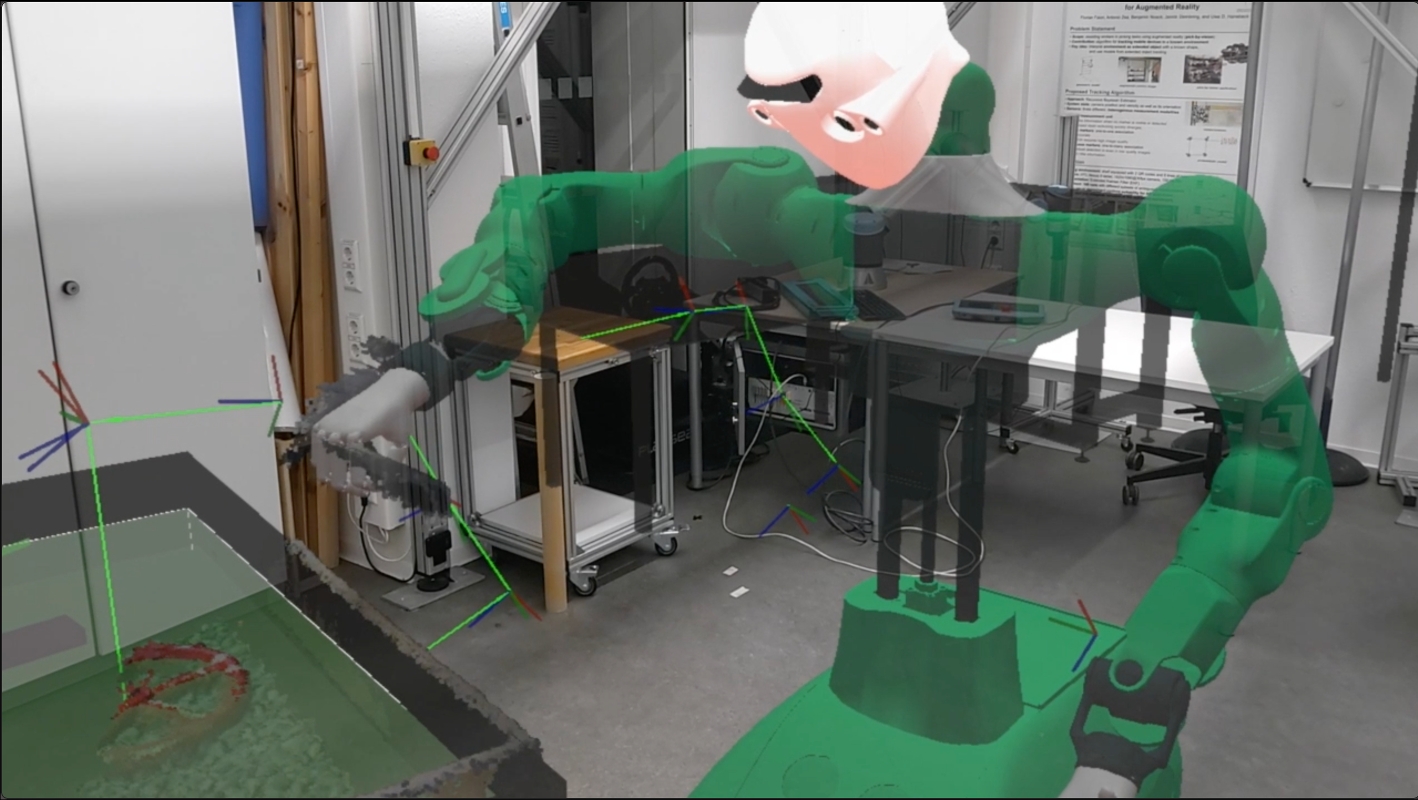
The concept is simple: the teleoperator brings a tablet, for example, launches the app, connects to the system, and can immediately add robots and sensor data to the scene at the tap of a finger. Using the standardized ROBDEKON interface, it is easy to know which robots are active, what they are observing, and how to interact with them. This makes it possible to drag and drop a platform to a target position, control a manipulator's pose with your own hand movements, or grab a barrel with an excavator – all without pretraining and with high accuracy.