· News
iviz: eine App zur Visualisierung und Teleoperation von Robotern in AR und VR
Das KIT veröffentlicht die neu entwickelte App »iviz« zur Visualisierung und Teleoperation von Robotern mittels Virtual and Augmented Reality.
Im Rahmen der Dekontaminationsaufgaben in ROBDEKON werden unterschiedlichste Robotersysteme eingesetzt, von kleinen Plattformen und humanoiden Robotern bis hin zu großen 20-Tonnen-Baggern. Diese Roboter dürfen aber nicht vor Ort operiert werden, da die behandelten Schadstoffe für menschliche Operatoren gefährlich sind. Daher werden in ROBDEKON neuartige Verfahren zur Teleoperation von entfernten Robotern entwickelt, die Technologien wie Augmented und Virtual Reality mit (Teil-)Autonomie-Algorithmen aus der Robotik und maschinellem Lernen fusionieren.
Die App »iviz« entstand aus der Herausforderung, räumlich getrennte Roboterkomponenten, die mit dem Robot Operating System (ROS) miteinander kommunizieren, in einer gemeinsamen virtuellen Welt zu visualisieren und zu teleoperieren. Dabei soll es unerheblich sein, ob der Benutzer am Desktop-PC sitzt, in einer VR-Umgebung arbeitet oder eine AR-Datenbrille trägt.
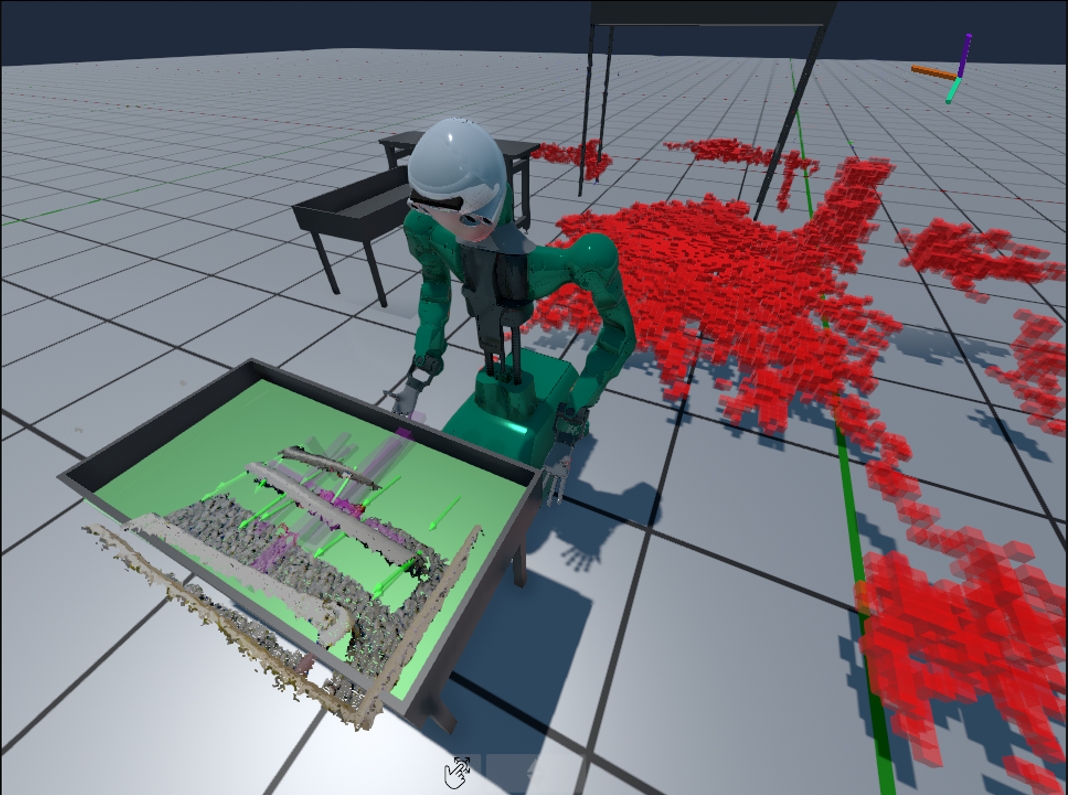
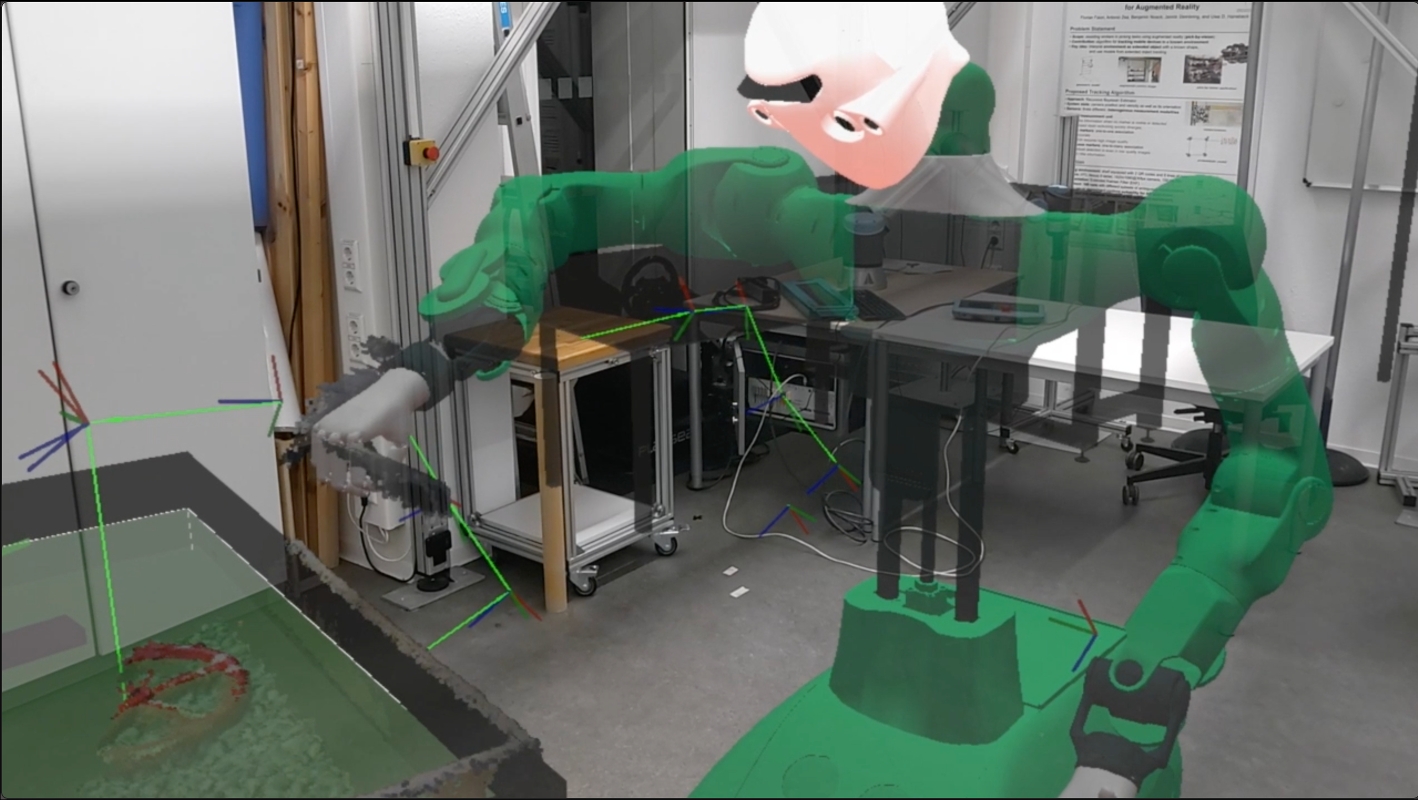
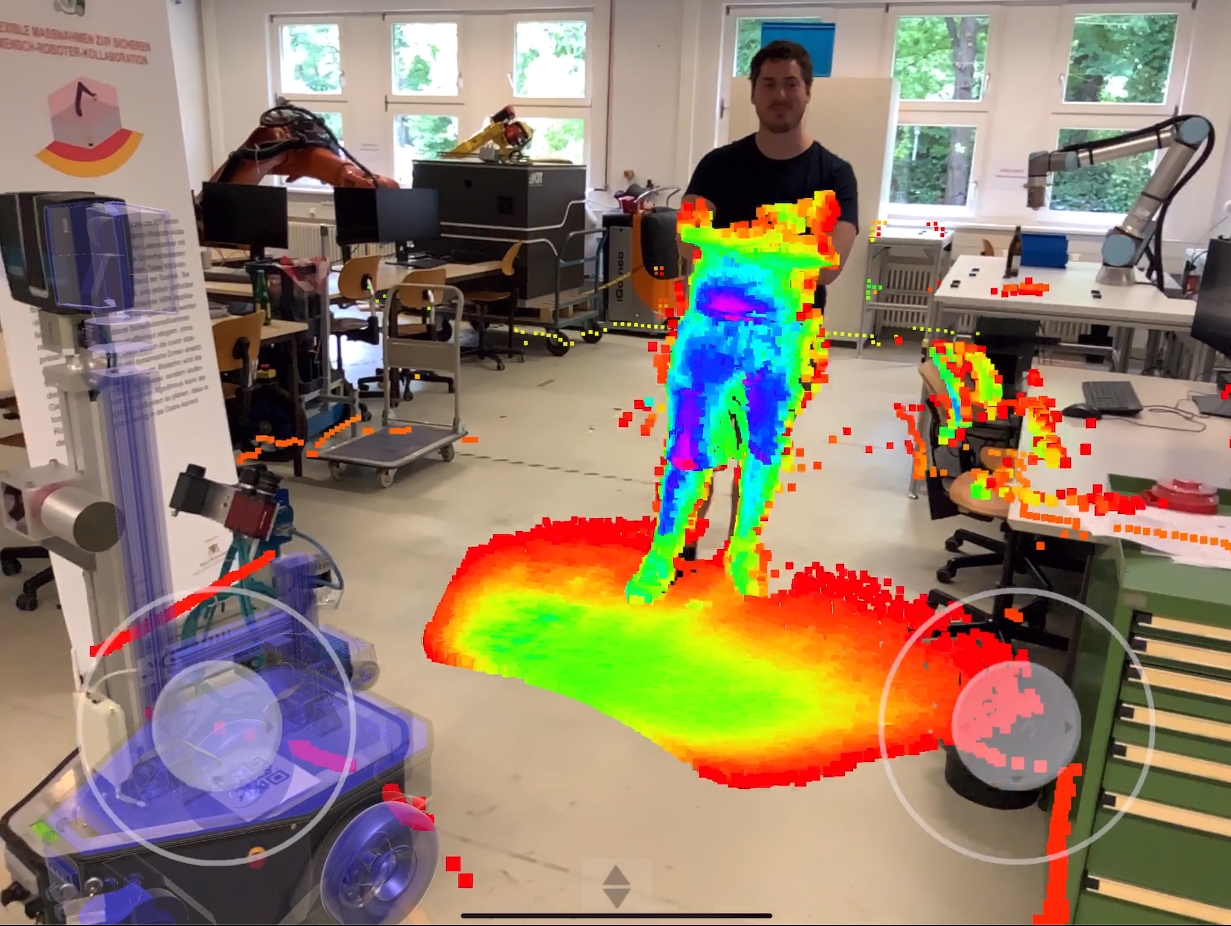
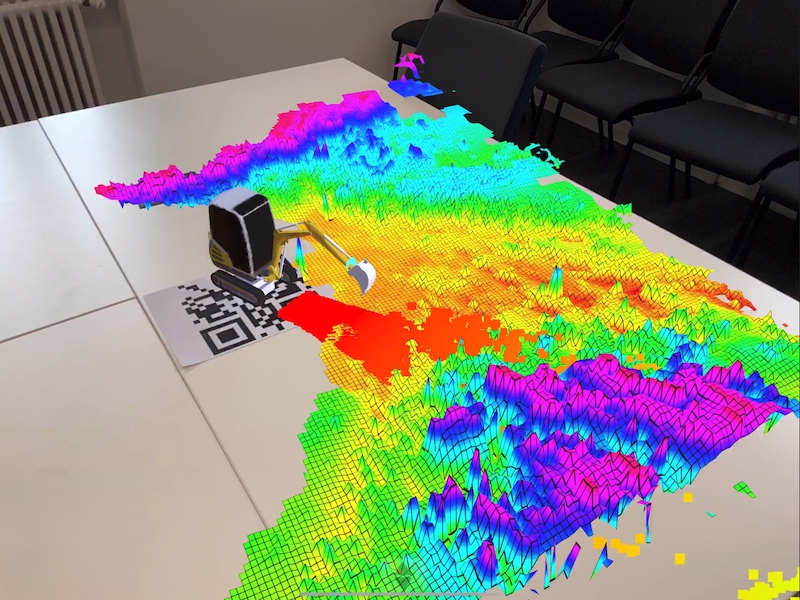
Das Konzept ist einfach: Der Teleoperator bringt beispielsweise ein Tablet mit, startet die App, verbindet sich mit dem System, und kann sofort Roboter und Sensordaten per Fingertipp in der Szene hinzufügen. Mithilfe der standardisierten ROBDEKON-Schnittstelle ist es einfach zu wissen, welche Roboter aktiv sind, was sie beobachten, und wie man mit ihnen interagieren kann. Auf diese Weise lässt sich eine Plattform per Drag-and-Drop zu einer Zielposition bewegen, die Pose eines Manipulators mit den eigenen Handbewegungen steuern oder ein Fass mit einem Bagger greifen – und das alles ohne Vortraining und mit hoher Genauigkeit.