· News
VDB Mapping: Framework for real-time 3D mapping released
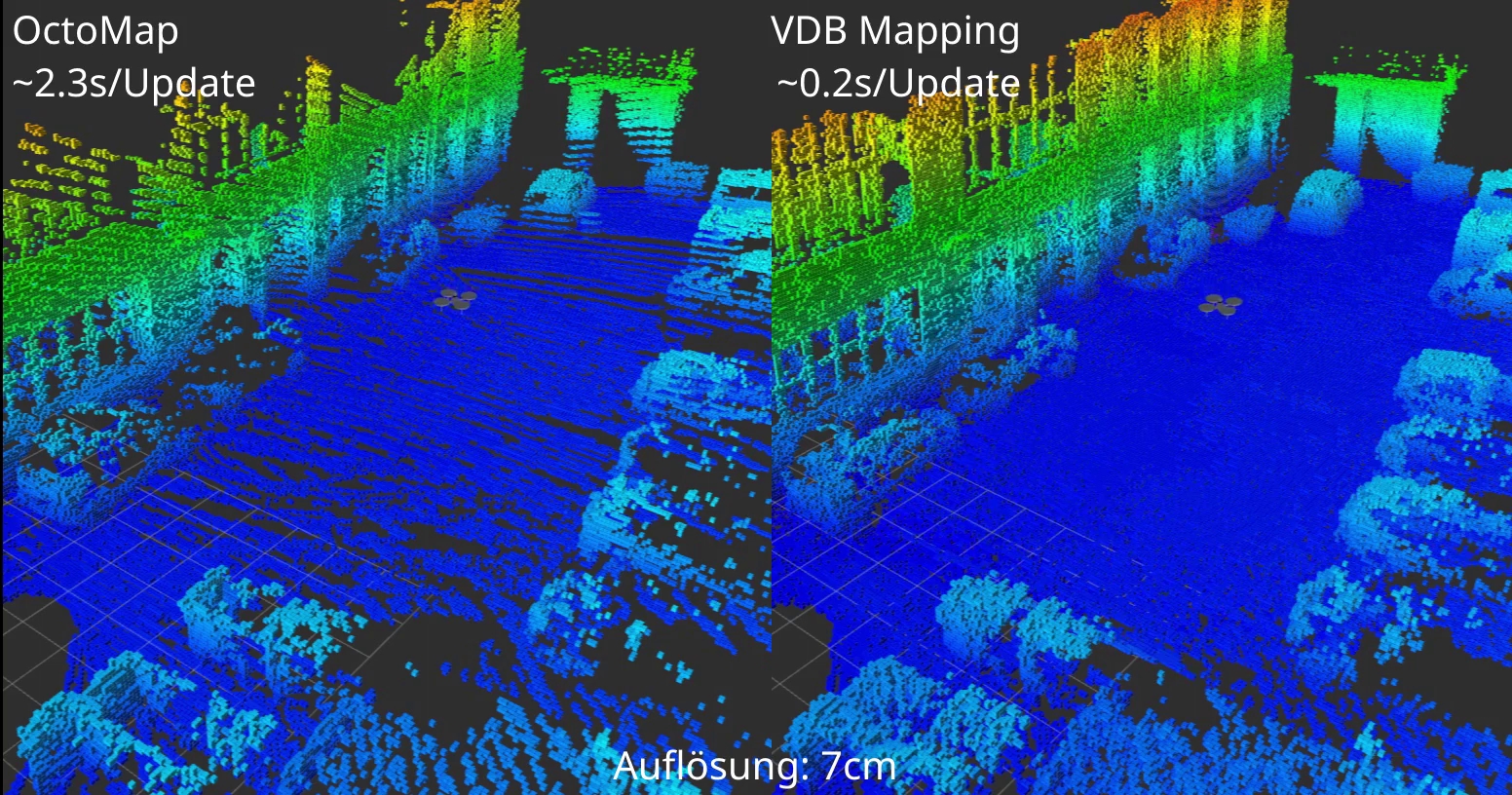
The FZI Forschungszentrum Informatik has released »VDB Mapping«, a high-performance probabilistic 3D mapping framework that generates volumetric environment maps in real-time from lidar data.
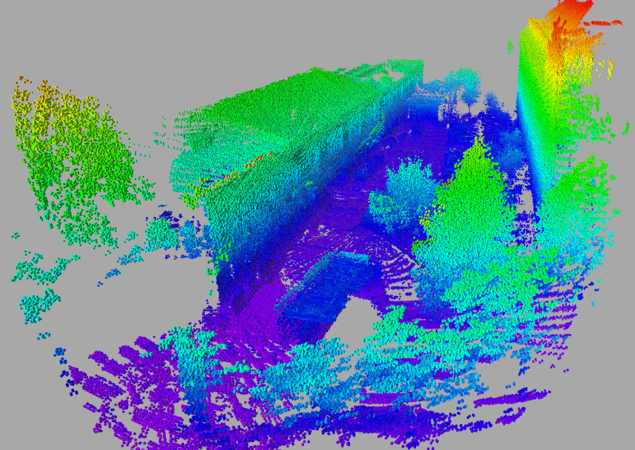
For the mapping, the environment of the robot is divided into a three-dimensional grid of discrete voxels, which reflect the respective occupancy state of the environment. For data management, OpenVDB grids are used, which can be used for efficient storing of large maps. Another advantage of the highly optimized OpenVDB data structure is that new lidar measurement points can be quickly integrated into the map structure. In addition to the occupancy state, it is possible to store any other states within each voxel; for example, the ambient temperature or local radiation values can be recorded in the grid. You may also store probabilities that describe the risk to drive on a surface. The generated 3D maps can then be used to efficiently plan routes through rough terrain. By using the additional information stored in the map, areas that are dangerous for the robotic systems can be taken into account in the navigation planning and can thus be avoided or flown around. In ROBDEKON, the framework is used to quickly map the environment in an online manner across multiple robotic systems. These maps are then used to apply various planning procedures for the task at hand.
VDB Mapping is released under the Apache 2.0 license to be available to a broad community beyond ROBDEKON. The framework is divided into two packages: The Core Library provides all the basic functionality needed for mapping. A ROS Wrapper provides a direct and easy connection to the Robot Operating System.