· News
VDB Mapping: Framework zur Echtzeit-3D-Kartierung veröffentlicht
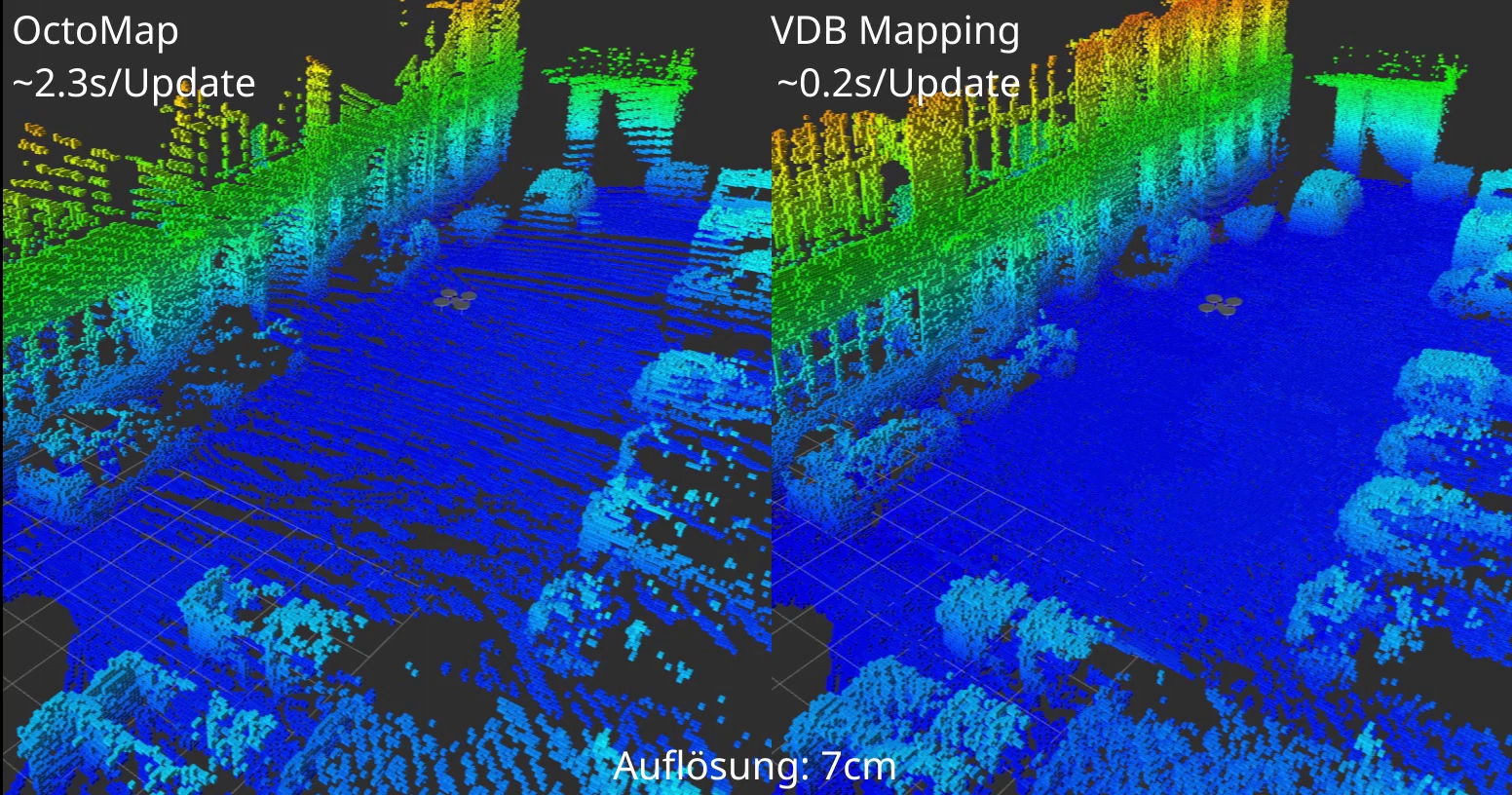
Das FZI Forschungszentrum Informatik hat mit »VDB Mapping« ein performantes probabilistisches 3D-Kartierungs-Framework, welches in Echtzeit aus Lidar-Daten volumetrische Umgebungskarten generiert.
Für die Kartierung wird die Umgebung des Roboters in ein dreidimensionales Grid diskreter Voxel aufgeteilt, welche den jeweiligen Belegtheitszustand der Umgebung widerspiegeln. Zur Datenhaltung wird hierbei auf OpenVDB Grids gesetzt, mit deren Hilfe große Karten effizient gespeichert werden können. Ein weiterer Vorteil durch die hochoptimierte OpenVDB-Datenstruktur ist, dass neue Lidar-Messpunkte schnell in die Kartenstruktur integriert werden können. Zusätzlich zum Belegtheitszustand ist es möglich, beliebige weitere Zustände innerhalb jedes Voxels zu speichern; so können zum Beispiel die Umgebungstemperatur oder lokale Strahlungswerte in das Grid eingetragen werden. Es können aber auch Wahrscheinlichkeiten eingetragen werden, welche das Risiko beschreiben, mit dem ein Untergrund befahren werden kann. Die generierten 3D-Karten können anschließend für die effiziente Planung von Routen durch unwegsames Gelände genutzt werden. Durch die Nutzung der zusätzlich in der Karte hinterlegten Informationen können für die Robotersysteme gefährliche Gebiete mit in der Navigationsplanung berücksichtigt und somit umfahren oder auch umflogen werden. In ROBDEKON wird das Framework zur schnellen online Erfassung der Umgebung über mehrere Robotersysteme hinweg eingesetzt. Auf diesen Karten werden anschließend verschiedene Planungsverfahren für die jeweilige Aufgabe angewendet.
VDB Mapping ist unter der Apache-2.0-Lizenz veröffentlicht, um auch über ROBDEKON hinaus einer breiten Community zur Verfügung zu stehen. Das Framework teilt sich in zwei Pakete auf: Die Core Library stellt alle grundlegenden Funktionen, die zum Kartieren nötig sind, zur Verfügung. Ein ROS Wrapper ermöglicht eine direkte und einfache Anbindung an das Robot Operating System.