Deutsches Forschungszentrum für Künstliche Intelligenz GmbH
Das Deutsche Forschungszentrum für Künstliche Intelligenz (DFKI) GmbH wurde 1988 als gemeinnützige Public-Private Partnership (PPP) gegründet. Es unterhält Standorte in Kaiserslautern, Saarbrücken und Bremen. Das DFKI ist auf dem Gebiet innovativer Softwaretechnologien auf der Basis von Methoden der Künstlichen Intelligenz die führende wirtschaftsnahe Forschungseinrichtung Deutschlands.
Das Robotics Innovation Center (RIC) zählt zum Bremer Standort. Hier entwickeln Wissenschaftlerinnen und Wissenschaftler unter Leitung von Prof. Dr. Dr. h.c. Frank Kirchner mobile Robotersysteme, die an Land, zu Wasser, in der Luft und im Weltraum für komplexe Aufgaben eingesetzt werden.
Forschungsschwerpunkt in ROBDEKON
Das DFKI RIC bearbeitet das Teilvorhaben »Mobile teilautonome Roboter in Rückbauszenarien unter Koordination durch den Menschen«. Roboter und Menschen sollen gemeinsam in Rückbau- oder Dekontaminationsvorgängen industrieller Anlagen eingesetzt werden und sich gegenseitig ergänzen. Dazu muss die entwickelte Technologie eine enge Kooperation zwischen Mensch und Roboter vor Ort, aber auch in Teleoperationsszenarien zulassen.
Das RIC bringt seine langjährige Expertise in der Entwicklung mobiler autonomer Roboter speziell für den Einsatz in menschenfeindlichen Umgebungen wie dem Weltraum oder der Tiefsee ein, da Systeme in kontaminierten Gebieten ganz ähnliche Anforderungen erfüllen müssen.
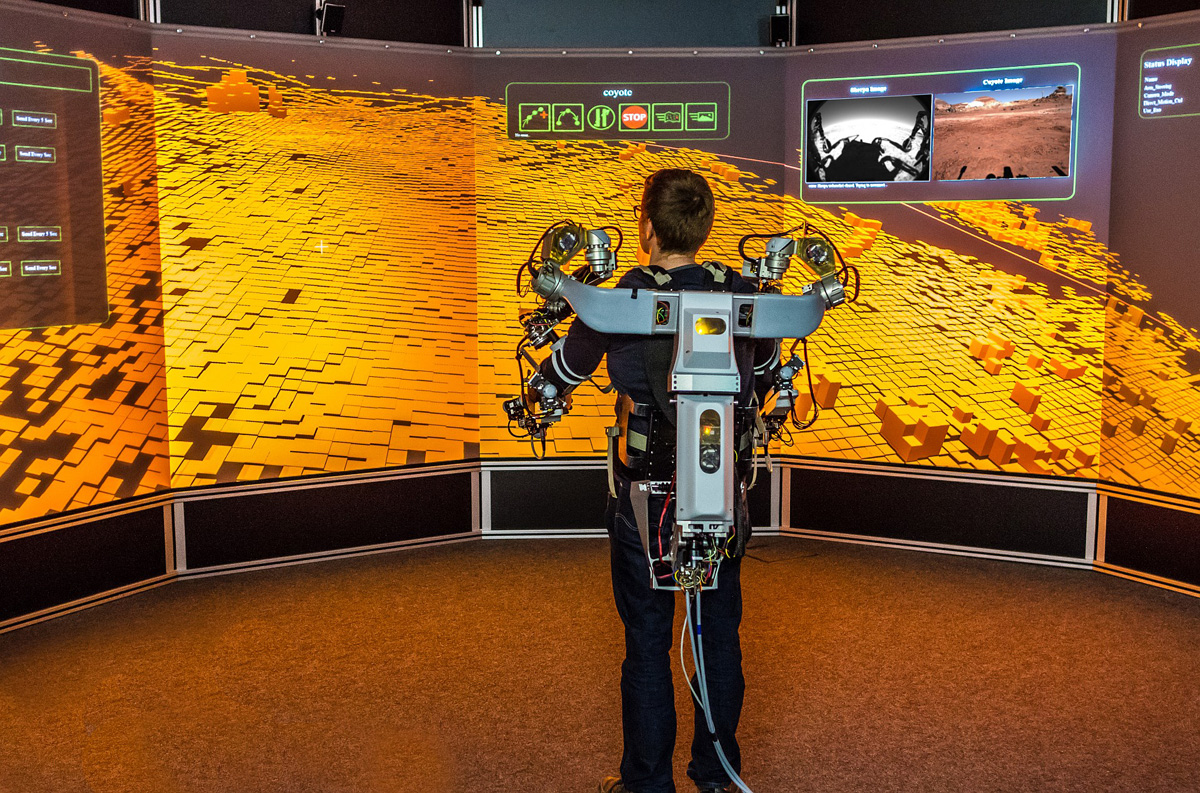
Im Rahmen von ROBDEKON befasst sich das DFKI mit unterschiedlichen Themenkomplexen. Den Menschen zunehmend von potenziellen Gefährdungen entfernt zu halten, ist dabei oberstes Ziel. Entsprechend bedeutend ist dafür die (Weiter-) Entwicklung eines Leitstands. Aufgrund der Vielzahl von möglichen Arbeiten ist davon auszugehen, dass nicht alle anstehenden Aufgaben von einem System autonom erledigt werden können. Vielmehr wird es darauf ankommen, bestimmte Teilaufgaben zu automatisieren und dem Menschen dabei immer die Möglichkeit zu geben, einzugreifen. Neben dem stationären Leitstand lassen sich die Systeme ebenfalls auch von einem mobilen Leitstand steuern, der nicht an ein Labor gebunden ist. Die Visualisierung mehrerer Robotersysteme und deren Sensordaten in einer virtuellen 3D Umgebung ist dabei von großer Relevanz, damit der Bedienter einen möglichst realistischen Eindruck von der Umgebung bekommt. Je nach Szenario und Aufgabe des jeweiligen Systems ist es möglich, online die Eingabegeräte zu wechseln. Die Integration externer Datenströme in den Leitstand, um Operator in die Situation vor Ort zu versetzen und so einen höheren Grad an Immersion realisieren, ist ebenfalls Bestandteil der Arbeiten.
Abgeschlossen sind die Entwicklung und Umsetzung eines Autonomiekonzepts für Baumaschinen. Dies wird beispielsweise anhand des Umbaus eines agilen Schreitbaggers mit dem Namen ARTER gezeigt. ARTER basiert auf einem Menzi Muck M545 Schreitbagger, welcher für den teleoperierten sowie autonomen Betrieb umgerüstet wurde. Hierfür wurden diverse PCs sowie speicherprogrammierbare Steuerungseinheiten (SPS) eingebaut und elektrische Steuerventile ergänzt. Zusätzlich angebrachte Sensorik in den Hubzylindern und an wichtigen Gelenken geben Auskunft über den Systemzustand von ARTER. Ein mehrschichtiges Sicherheitskonzept in Hard- und Software stellt sicher, dass der Bagger während der Entwicklung, den Experimenten und im Einsatz jederzeit sicher gehandhabt werden kann.
ARTER erfasst mit Hilfe seiner vielfältigen Sensoren seine Umwelt und liefert einem externen Leitstand ein umfassendes Lagebild von sich, seiner Umgebung sowie seiner Mission. Im Bedarfsfall kann der Roboter-Bagger über Gamepads, zwei Joysticks oder mit einem Virtual Reality Headset teleoperiert werden. Die Steuerung in einem dreidimensional erzeugten Abbild seiner Umgebung erzeugt einen völlig neuen Kontrollansatz, da Perspektive, Größenverhältnis, Umgebungsinformationen und Force-Feedback frei wählbar sind.
