· News
ROBDEKON präsentiert Entwicklungsstand – Fortschritte bei Dekontaminationsaufgaben: Roboter haben dazugelernt
Mitte 2018 hat das Kompetenzzentrum ROBDEKON (Robotersysteme für die Dekontamination in menschenfeindlichen Umgebungen) den Betrieb aufgenommen. Nach drei Jahren Laufzeit stand nun turnusgemäß eine Begutachtung an – aus diesem Anlass präsentierten die ROBDEKON-Partner in Karlsruhe und Bremen den Stand Entwicklung und demonstrierten live die teleoperierten, teilautonomen und autonomen Systeme, an denen sie forschen.

Die Einleitung übernahm ROBDEKON-Sprecher Prof. Dr.-Ing. habil. Jürgen Beyerer. Er erläuterte in seinem Vortrag unter anderem, wie sich das im Strahlenschutz seit langem grundlegende ALARA-Prinzip (»as low as reasonably achievable«) dank technologischer Fortschritte in der Robotik nun auch auf neue Anwendungsbereiche übertragen lässt, wo Menschen chemischen Kontaminationen oder anderen Gefährdungen ausgesetzt wären.

Die Anwendungspartner ICP Ingenieurgesellschaft Prof. Czurda und Partner GmbH, Kraftanlagen Heidelberg GmbH und Kerntechnische Hilfsdienst GmbH gingen anschließend detaillierter auf die Szenarien ein, für die in ROBDEKON Robotersysteme entwickelt werden: den Rückbau kerntechnischer Anlagen, die Dekontamination von Anlagenteilen und Abfällen sowie die Sanierung von Altlasten.

Das FZI Forschungszentrum Informatik zeigte, wie mobile Roboter auf Beinen und Rädern zusammenwirken können, um Gefahrstoffe zu bergen. Außerdem haben die Forscher*innen aus Karlsruhe einem Industrieroboter-Arm beigebracht, auf einem Fließband herantransportierte Altbatterien typabhängig in Sammelbehälter zu sortieren.


Am Fraunhofer-Institut für Optronik, Systemtechnik und Bildauswertung IOSB wird an den Standorten Karlsruhe und Ilmenau unter anderem an Autonomie-Kits gearbeitet, die seriennahe Baumaschinen zu (teil-)autonomen Robotern für die Altlastensanierung machen. Demonstriert wurde, wie ein führerloser 24-Tonnen-Bagger autonom Erdschichten abträgt und auf den Anhänger eines ebenfalls autonom agierenden Traktors lädt.

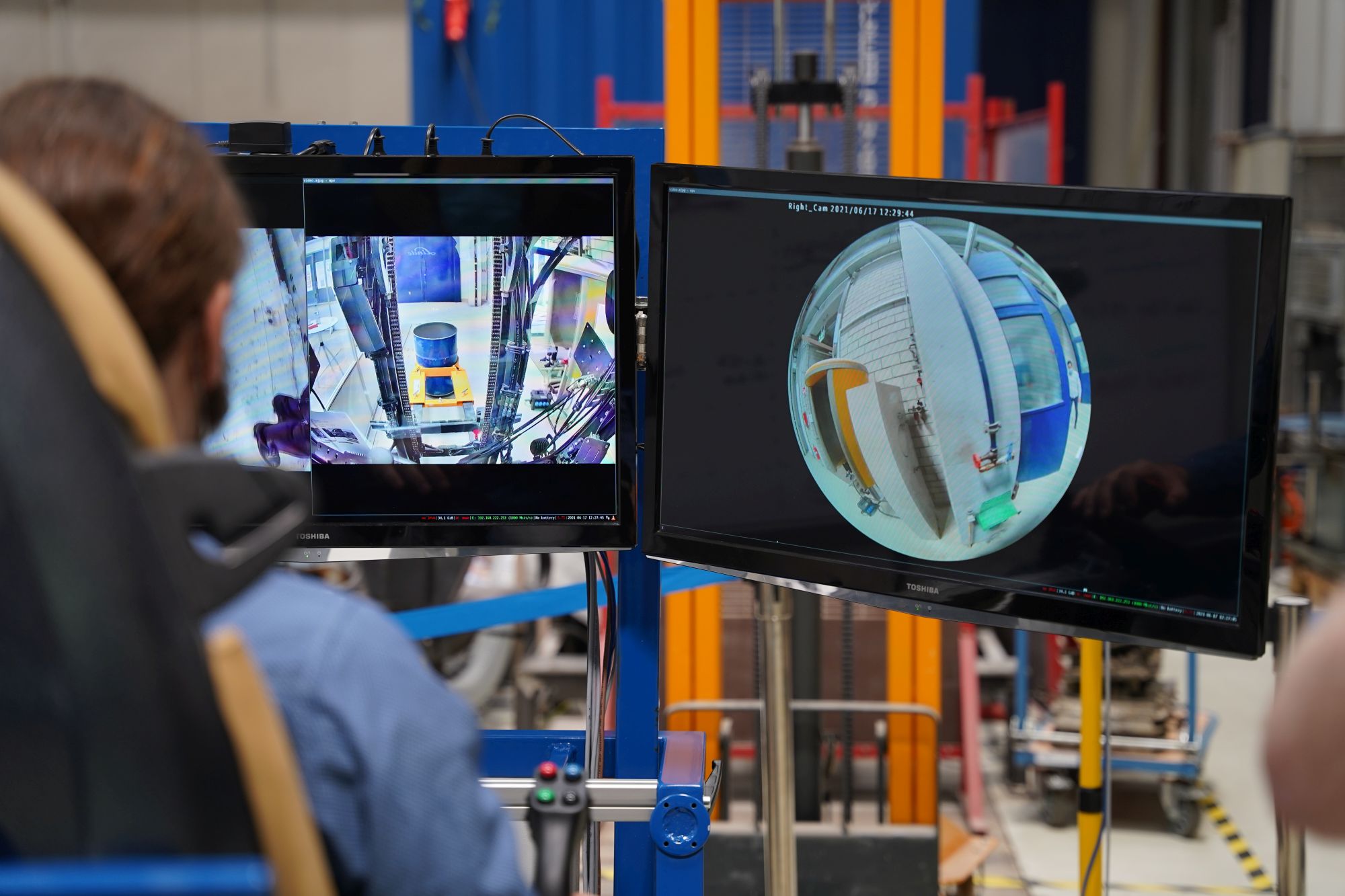
Der Lehrstuhl für Intelligente Sensor-Aktor-Systeme (ISAS) des Karlsruher Instituts für Technologie (KIT) präsentierte die universelle ROBDEKON-Schnittstelle, mittels derer sich alle im Projekt entwickelten Leitstände und Roboter zusammenschalten lassen, sowie verschiedene innovative Ansätze zur Fernsteuerung und Programmierung von Manipulatoren.

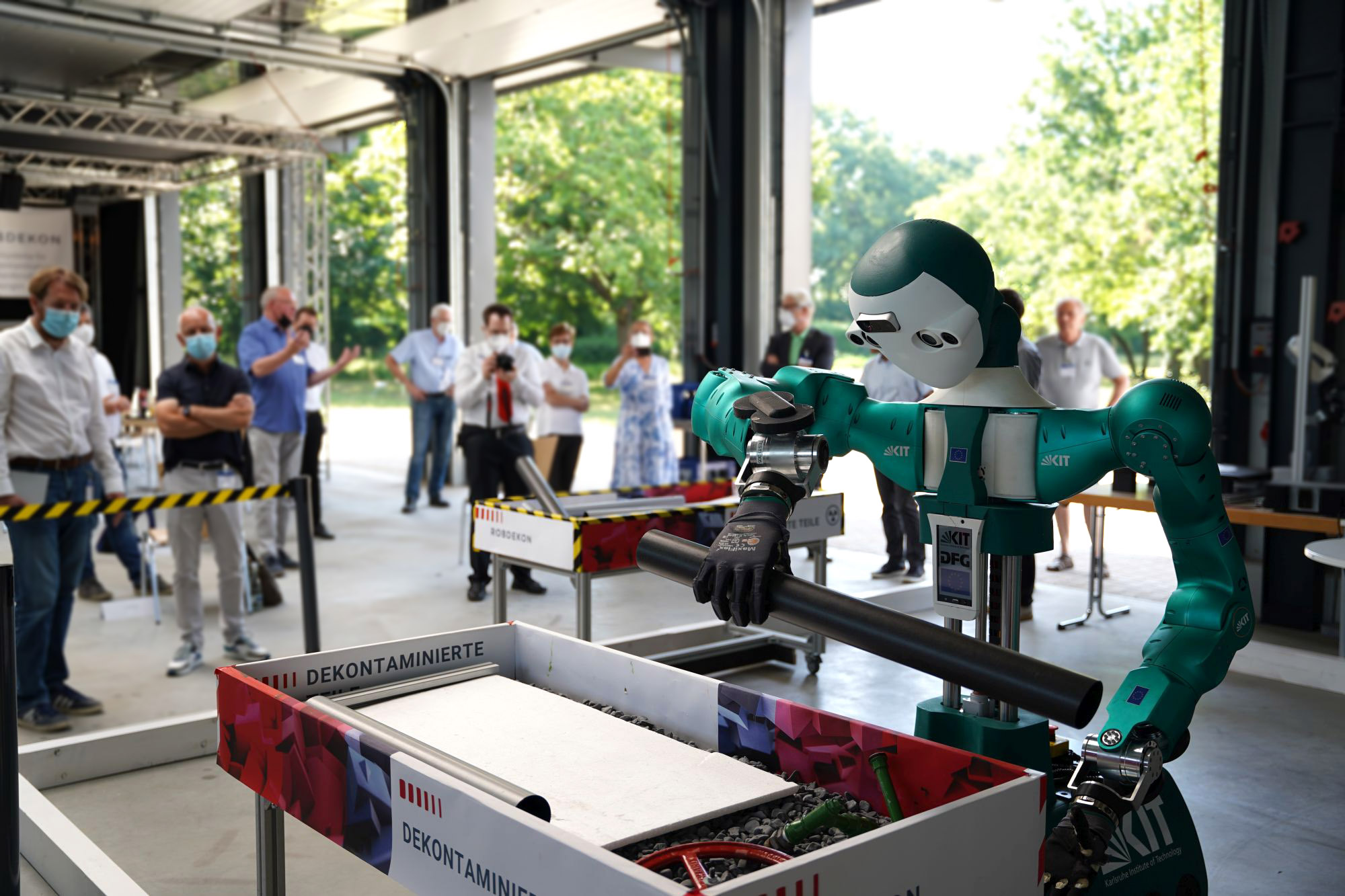
Insbesondere auf Anwendungen im Rückbau von Kernkraftwerken zielen die Entwicklungen von weiteren beteiligten KIT-Teams: Der Lehrstuhl Hochperformante Humanoide Technologien (H2T) demonstrierte die Fähigkeit des humanoiden Roboters ARMAR-6, Anlagenteile autonom zu erkennen, zu greifen und an einen definierten Ablageort zu bringen.
Der Lehrstuhl für Intelligente Prozessautomation und Robotik (IPR) und das Institut für Technologie und Management im Baubetrieb (TMB) präsentierten gemeinsam, wie sich der gesamte Prozess der Gebäudedekontamination durch Roboter abdecken lässt: Zunächst vermisst der GammaBot autonom die Räume, anschließend fräst ein weiterer Roboter vollautomatisch die oberste Betonschicht ab, bevor er durch eine Strahlungsmessung den Erfolg der Dekontamination bestätigt.


Der Industriepartner Götting KG führte vor, wie sich mittels eines speziell entwickelten Leitstands ein Gabelstapler fernsteuern lässt; konkret wurde der Transport von potenziell kontaminierten Fässern demonstriert.
Die Arbeiten des ebenfalls an ROBDEKON beteiligten Deutschen Forschungszentrums für Künstliche Intelligenz (DFKI) wurden vorab vor Ort in Bremen begutachtet. Hier wurde ein automatisierter Schreitbagger vorgeführt, der mit Blick auf die Dekontamination von Deponien entwickelt wird. Außerdem wurden der Rover SHERPA und Möglichkeiten für Telepräsenz in einer »Virtual Reality Cave« präsentiert.

ROBDEKON wird vom Bundesministerium für Bildung und Forschung im Rahmen des Programms »Forschung für die Zivile Sicherheit« über zunächst vier Jahre mit 12 Millionen Euro gefördert. Koordinator ist das Fraunhofer IOSB, wo auch das ROBDEKON-Koordinationsbüro angesiedelt ist.